This forum is disabled, please visit https://forum.opencv.org
| 2017-10-31 06:03:47 -0600 | received badge | ● Notable Question (source) |
| 2016-09-22 05:05:04 -0600 | received badge | ● Popular Question (source) |
| 2013-12-14 10:27:05 -0600 | commented answer | how to detect middle circle in IOS OpenCV If I understood correctly your question, you extract contours from an image and the contours correspond to a warped octagon, and you want to unwarp it. To unwrap you could see this tutorial: http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/warp_affine/warp_affine.html#warp-affine I don't know if there is a specific function to fit octagon with a square, maybe you could try to see convex hull: http://docs.opencv.org/trunk/doc/tutorials/imgproc/shapedescriptors/hull/hull.html however I think that if you have the sorted vertexes of the octagon you can use three of them to unwrap it. |
| 2013-12-14 09:52:15 -0600 | commented answer | Stereo calibration baseline in meters Ok, thank you jensenb. |
| 2013-12-11 18:50:21 -0600 | received badge | ● Nice Answer (source) |
| 2013-12-11 11:45:36 -0600 | received badge | ● Teacher (source) |
| 2013-12-11 11:16:19 -0600 | commented answer | how to draw rectangles from find countours Thanks berak, it was wrong. Yes with ^ I meant pow not bitwise xor. |
| 2013-12-11 11:05:55 -0600 | commented answer | how to detect middle circle in IOS OpenCV If the square has sides parallel to the borders of the image you could extract a region of interest of the original image, using for example: using namespace cv; Mat img_orginal; Rect region = rect(x,y,w,h); Mat sub_img(region); and then use hough_circle to find the circles inside that region. x,y : Coordinates of the top-left corner w,h : Rectangle width and height |
| 2013-12-11 10:46:08 -0600 | received badge | ● Critic (source) |
| 2013-12-11 10:36:22 -0600 | answered a question | Stereo calibration baseline in meters Is the focal length in the camera matrix in pixels? Since I have 2 camera matrices obviously with different intrinsic parameters what camera matrix can I use as reference the first one or the second one? |
| 2013-12-11 08:52:23 -0600 | commented answer | Stereo calibration baseline in meters My next step will be to synchronize in hardware the two cameras so the stereo system will works with non static scene. |
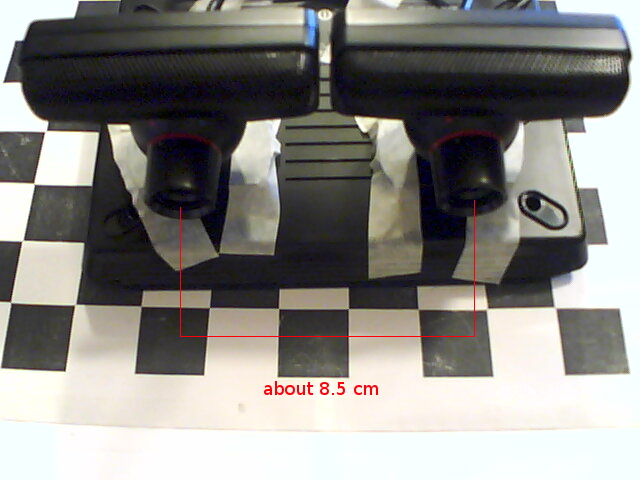
| 2013-12-11 08:44:53 -0600 | commented answer | Stereo calibration baseline in meters Perfect, now I understand that I should multiply that value for 2.4 cm, that is the size of the chessboard elements. Infact -3.5152250398995970 cm * 2.4 cm= 8.4365401 cm, that seems to be coherent with the ruler's measurement of about 8.5 cm. For clarity this is the code where I specify the object coordinate points: Thank you so much for your useful and complete answer. |
| 2013-12-11 08:16:17 -0600 | received badge | ● Scholar (source) |
| 2013-12-11 08:16:07 -0600 | received badge | ● Supporter (source) |
| 2013-12-08 11:54:33 -0600 | received badge | ● Student (source) |
| 2013-12-05 08:16:11 -0600 | answered a question | Human height estimation using a calibrated camera If the person to be measured has for example in hand or on the t-shirt a marker of known size it is possible to obtain approximately the height. An other option if you don't move the camera could be to put same marker on the floor at a known distance and say to the people to go with their shoes on those marker. Remember that if you don't know the distance between the camera and the object to be measured there's is an ambiguity problem, passing from 3d world to 2d coordinates you lose distances. |
| 2013-12-05 07:05:12 -0600 | asked a question | Stereo calibration baseline in meters Hi, I calibrated my stereo webcam with a chessboard and: stereoCalibrate(object_points, imagePoints1, imagePoints2, CM1, D1, CM2, D2, img1.size(), R, T, E, F, cvTermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5), CV_CALIB_SAME_FOCAL_LENGTH | CV_CALIB_ZERO_TANGENT_DIST); I need to know the baseline of the stereo camera in meters, so I look inside the T matrix. The first element of the T matrix is -1.6952669833501108e+00, the problem is that when I measure physically the distance between sensors with a ruler is approximately 4 cm, that is 0.04 m, what is the metrics of the elements in the T matrix? Therefore, I don't know the physical size of the pixels, because I don't know the sensor used. I tried to calibrate another stereo rig with baseline of about 8.5 cm:
in this case the baseline computed is -3.5152250398995970e+00: T: !!opencv-matrix rows: 3 cols: 1 dt: d data: [ -3.5152250398995970e+00, -3.3355285984050492e-02, -1.1137642414481164e-01 ] how is it possible? |
| 2013-12-05 06:48:33 -0600 | received badge | ● Editor (source) |
| 2013-12-05 06:47:51 -0600 | answered a question | how to draw rectangles from find countours Using the coordinates you could compute the area of each rectangle and then threshold on it. area = (abs(x1-x0) * abs(y1-y0)); if(area>threshold) draw You should check the index used to compute the width and the height of the rectangle because I'm not sure of the order returned by the function that find rectangles. |
| 2013-12-05 05:07:01 -0600 | answered a question | Number of pixels changed per frame compared to frame before? You could use absdiff to find differences between images: Mat img1, img2, img3; img3 = absdiff(img1,img2); http://docs.opencv.org/modules/core/doc/operations_on_arrays.html#absdiff |
| 2013-12-05 05:01:57 -0600 | answered a question | Can't unpack opencv-2.4.7. exe | Win 7 32 x Try to install 7zip http://www.7-zip.org/download.html |
| 2013-12-05 04:58:59 -0600 | answered a question | how to detect middle circle in IOS OpenCV |