This forum is disabled, please visit https://forum.opencv.org
| 2020-04-15 18:33:22 -0600 | received badge | ● Popular Question (source) |
| 2020-02-18 22:32:16 -0600 | received badge | ● Famous Question (source) |
| 2018-11-10 15:46:48 -0600 | received badge | ● Notable Question (source) |
| 2018-04-26 07:04:14 -0600 | received badge | ● Popular Question (source) |
| 2016-11-30 05:33:10 -0600 | commented question | Find Corners of a contour Done ...;) |
| 2016-11-30 03:05:10 -0600 | commented question | Find Corners of a contour Thanks for the help. Thats exactly what I mean :) |
| 2016-11-29 07:14:02 -0600 | asked a question | Find Corners of a contour Hello, i want to know how i can find the pixel postion of the corner points of a contour? I use canny for edge detection and then I am finding the largest contour in the image (see image). Now I need the exact corner points. Important, the display position is variable
If I use minRectArea, I get bad results.
I hope someone can help me :) |
| 2016-11-17 01:20:52 -0600 | commented question | Tesseract finds letters where none are The whole preprocessing is opencv. FindContours, Grab ROI. Now I thought, someone knows here also with tesseract |
| 2016-11-17 01:02:04 -0600 | asked a question | Tesseract finds letters where none are Hello guys, I need your help :) I use tesseract for text recognize. Therefor I grab al lot of ROI´s in my Image. Of course some ROI´s are garbage or contain a symbol (see the pictures). But tesseract also find text here like "“v" or a single letter -_-. Symbol https://picload.org/image/rdwaaiop/sy... Garbage https://picload.org/image/rdwaailg/ga... initilize tesseract OCR engine How can I prevent this? Thanks. |
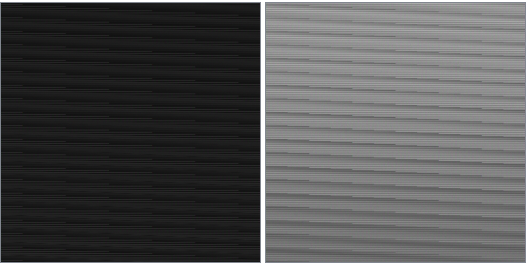
| 2016-11-14 06:32:21 -0600 | asked a question | 3D Rotation - warpPerspective Hello guys, I need your help. It is possible to rotate this image with the rotation matrix from the calibration? I would like to align the image for the further processing If I use warpPerspective and the Rotationmatrix from this camera I get garbage. My Image: http://fs5.directupload.net/images/16... My rotation Matrix: Output: http://www.bilder-upload.eu/show.php?... Thanks for your help |
| 2016-10-26 00:27:42 -0600 | commented question | Boounding Rect float return thanks for your help |
| 2016-10-24 04:38:53 -0600 | asked a question | Boounding Rect float return Hello, is it possible to get float or double values from bounding rect? I would like to triangulate them and for that I need the exact values and no int. Thanks for your help. |
| 2016-10-18 04:43:29 -0600 | commented question | findContours ERROR The problem was the linking of vs15 and opencv...know it works |
| 2016-10-17 10:03:41 -0600 | commented question | findContours ERROR no I use the debug libs for debug and the release for release. Strange is that it works debug compiled in VS but not the debug.exe version |
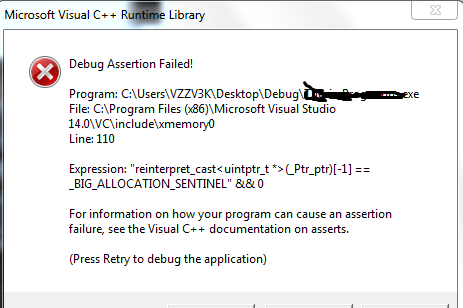
| 2016-10-17 07:43:32 -0600 | asked a question | findContours ERROR Hello, I need your help! When I compile my code in VS15 in debug mode and start it with VS everything works. But if I run my program as debug exe, I get this error after findContours
The problem comes from findContours, but I have no idea to fix it. -_- If I create a release version of my application. The app crashes without an error. |
| 2016-10-12 06:33:34 -0600 | commented question | Buffer to Mat Is working. Thank you very much :) |
| 2016-10-12 06:11:11 -0600 | commented question | Buffer to Mat About the PixelFormat I found the following https://secure.toshiba-teli.co.jp/ttf... According to api the Pixel Format is BayerGR8 |
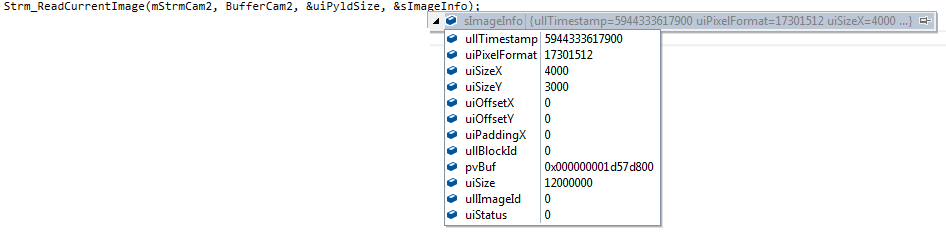
| 2016-10-12 05:54:19 -0600 | commented question | Buffer to Mat These are the image information I get from the function. Or do you mean something different?
|
| 2016-10-12 05:05:45 -0600 | asked a question | Buffer to Mat Hello guys, I need your help. I work with two cameras with a resolution of 4000x3000. Because of USB3 Vision I can only access with the manufacturer api on pictures. As return value I get a pointer Now I want to write the data into a cv Mat like this Unfortunately my matrix keep empty. If I change size of the rows and cols like this it work, but the image is understandably garbage.
|
| 2016-09-23 04:14:16 -0600 | commented question | Triangulate Points from Stereo Image The unit is in mm. I need an accuracy of 0,5mm. Yes, it's possible that the chessboard are not exactly parallel to the image plane but what I have to change then, so that the values are constant? If I use the projection matrices from stereo rectify, all of my values are bad |
| 2016-09-22 00:18:52 -0600 | commented question | Triangulate Points from Stereo Image Short excursion My stereosystem consists of vertical parallel-aligned cameras. I calibrate the cameras with several chessboard images from various positions (load the images from desktop) and create the 3D points of my chessboard in its own coordinate system as follow Now I use the last image pair to check the triangulation. Image Camera up https://picload.org/image/rdrlldgd/me... Image Camera down https://picload.org/image/rdrlldgg/me... According to my understanding, after triangulation the depth must be constant, respectively the distance from camera to Chessboard. |
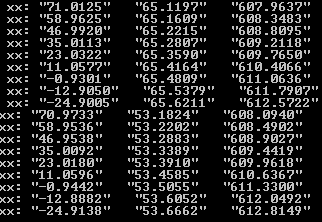
| 2016-09-21 07:15:31 -0600 | asked a question | Triangulate Points from Stereo Image Hello guys, I hope someone can help me with my problem :) That's my approach I have two cameras and now I want to calculate the 3D coordinates of an object. For this, I calibrate the cameras individually and then I use stereoCalibrate. Now I have the intrinsic and extrinsic parameters and would like to triangulate. To do that, I create the projection Matrices like this. Basically one camera I can keep as P1= K1 [I|0] (identity rotation and 0 translation), and the other camera P2= K2*[R|t] (rotation and translation between the cameras from stereoCalibrate()) These matrices I hand over to the triangulate function (http://www.morethantechnical.com/2012...) To test the triangulation Checkerboard: 9x6 and 12 mm per square I use the reference checkerboard images because the depth should be constant but i have depth "linear". The x and y coordinates are accurate over the entire distance to 0.2mm. The picture shows the values for the first two rows. As you can see the depth is strange
Anyone know where is my problem? Thanks. |
| 2016-09-19 06:53:47 -0600 | received badge | ● Editor (source) |
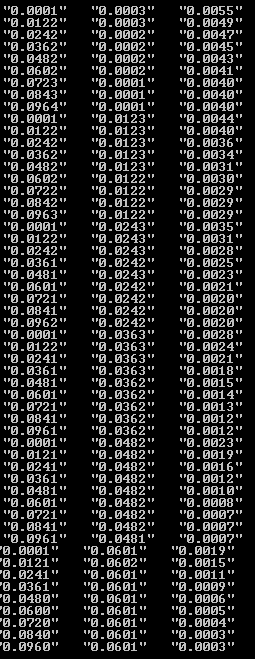
| 2016-09-19 01:15:28 -0600 | answered a question | Stereosystem triangulate points I have a new problem...as you can see, I create my projection matrix as described above. The z value of the triangulation is not good. As you can see the z value is constantly increasing although I triangulate the reference chessboard. Normally, the Z value would still be 0 Image
Can anyone help me? |
| 2016-09-19 00:45:46 -0600 | received badge | ● Enthusiast |
| 2016-09-13 12:52:08 -0600 | commented answer | Stereosystem triangulate points Okay, I will give it a try...thank you |
| 2016-09-13 04:09:21 -0600 | commented question | StereoCalibration RMS Problem Thanks for your help.... yes I forgot the flag Now everything fits....thank you |
| 2016-09-13 01:39:19 -0600 | asked a question | StereoCalibration RMS Problem Hi guys, I have a strange Problem. I want to calibrate a vertical stereo camera system. First I calibrate each camera individually The RMS are 0,21 and 0,23...thats okay...but now I use stereoCalibrate and the RMS is 24 Can someone help me? Thanks |
| 2016-09-12 10:05:09 -0600 | received badge | ● Student (source) |
| 2016-09-12 01:11:28 -0600 | commented answer | Stereosystem triangulate points And this...the variables mProjection1, mProjection2 I hand over to triangulate Unfortunately that was wrong, can you help me? |
| 2016-09-12 01:09:50 -0600 | commented answer | Stereosystem triangulate points Thanks for your help. But I think I'm doing something wrong. You say I need to invert one of the rotation/translation matrices To chain them I do this |
| 2016-09-12 00:56:52 -0600 | received badge | ● Supporter (source) |
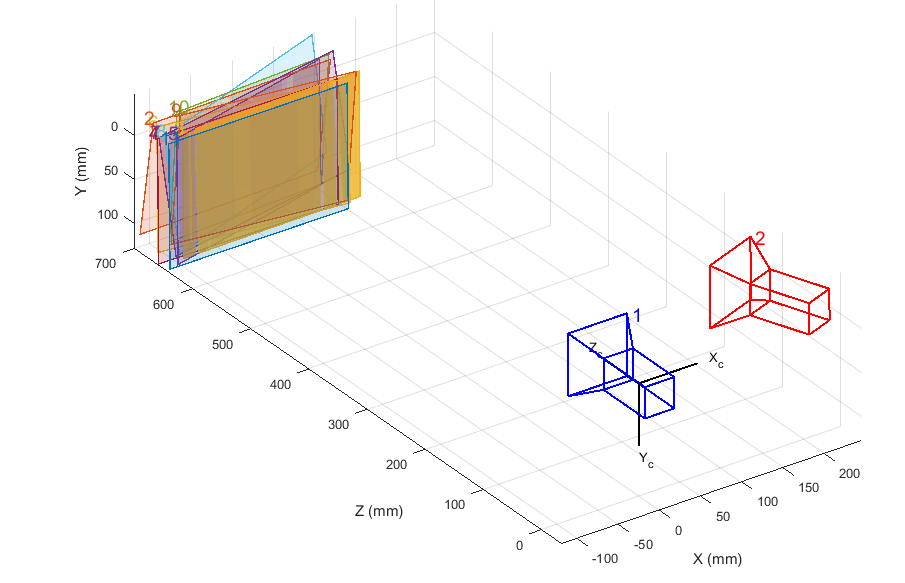
| 2016-09-11 11:00:49 -0600 | asked a question | Stereosystem triangulate points Hi guys, currently I am working on a program that takes 3d coordinates from non rectified stereo images with triangulate. First I give you a short insight into my program. I tried it on this way (OpenCV, C++): 1. 2. 3. 4. Thats the Stereo-System, Image is from Matlab
Now my question:To test the program I use the first chessboard images from the stereosystem, because I know all 3D coordinates (object points from 1), find the corners and triangulate them. My results look good because the calculated 3D points are the same as the object points from 1 The Z-Value is near to 0, I tkink the chessboard is probably the origin. But I want that the z value reflects the distance from the stereo camera system to object for example the first corner top left X: 0 ; Y: 0 ; Z: 64. Do you know what I mean? I hope someone can help me....thanks. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}