This forum is disabled, please visit https://forum.opencv.org
| 2020-07-22 09:49:43 -0600 | edited question | getPerspectiveTransform & perspectiveTransform getPerspectiveTransform & perspectiveTransform I'm using getPerspectiveTransform & perspectiveTransform to map p |
| 2020-07-21 18:59:06 -0600 | asked a question | getPerspectiveTransform & perspectiveTransform getPerspectiveTransform & perspectiveTransform I'm using getPerspectiveTransform & perspectiveTransform to map p |
| 2020-04-05 20:38:02 -0600 | received badge | ● Popular Question (source) |
| 2018-11-20 14:10:54 -0600 | edited question | cv::remap on a pre-rotated image cv::remap on a pre-rotated image cv::remap on a pre-rotated image I am undistorting images from my camera, based on cal |
| 2018-11-20 14:09:29 -0600 | asked a question | cv::remap on a pre-rotated image cv::remap on a pre-rotated image cv::remap on a pre-rotated image I am undistorting images from my camera, based on cal |
| 2018-10-30 13:31:53 -0600 | received badge | ● Notable Question (source) |
| 2018-08-09 05:16:45 -0600 | received badge | ● Teacher (source) |
| 2018-06-07 01:21:58 -0600 | received badge | ● Popular Question (source) |
| 2018-04-27 14:07:59 -0600 | commented answer | Training cuda::CascadeClassifier Thank you for the answer. A first attempt at this did indeed work as advertised! I was expecting not, mostly because of |
| 2018-04-27 14:05:29 -0600 | commented answer | Training cuda::CascadeClassifier Thank you for the answer. A first attempt at this did indeed work as advertised! I was expecting not, mostly because of |
| 2018-04-27 04:27:48 -0600 | marked best answer | Training cuda::CascadeClassifier I have been using haarcascades_cuda/haarcascade_frontalface* with cv::cuda::CascadeClassifier (for a while now) using OpenCV 3.4.1 and it works very well! However, I would really like to train using my own data. I have seen a lot of threads suggesting that this isn't really supported for the cuda class anymore. Is that so? Or is there a way to do it? Also, is the training data for the existing haarcascade_frontalface* classifiers available? Thank you! |
| 2018-04-26 14:59:52 -0600 | asked a question | Training cuda::CascadeClassifier Training cuda::CascadeClassifier I have been using haarcascades_cuda/haarcascade_frontalface* with cv::cuda::CascadeClas |
| 2018-03-22 10:57:17 -0600 | commented answer | Titan V - Hanging on cuda::CascadeClassifier::detectMultiScale Thanks for the response! I'm at this again, trying to get this working, but still no luck. I built using: cmake -DCUDA_ |
| 2018-02-26 14:30:19 -0600 | edited question | Titan V - Hanging on cuda::CascadeClassifier::detectMultiScale Titan V - Hanging on cuda::CascadeClassifier::detectMultiScale I am trying to get my software working on a Titan V (on U |
| 2018-02-26 14:30:02 -0600 | edited question | Titan V - Hanging on cuda::CascadeClassifier::detectMultiScale Titan V & OpenCV - Hanging on cuda::CascadeClassifier::detectMultiScale I am trying to get my software working on a |
| 2018-02-26 13:20:07 -0600 | asked a question | Titan V - Hanging on cuda::CascadeClassifier::detectMultiScale Titan V & OpenCV - Hanging on cuda::CascadeClassifier::detectMultiScale I am trying to get my software working on a |
| 2016-12-30 13:14:42 -0600 | commented question | Detecting (not decoding!) datamatrix (rectangle) regions in an image Appreciate the suggestions here. After some experimentation, I've had good luck with MSER after blurring, resizing and inRanging the image to give me black blobs where the codes are likely to be. It seems to work quite well, except that my results vary dramatically depending on lighting conditions. Any ideas on how I might normalize for these given the steps I mention? I tried the approach mentioned in http://answers.opencv.org/question/75... , but it doesn't seem to solve the issue... Thanks again. |
| 2016-12-16 15:09:24 -0600 | commented question | Detecting (not decoding!) datamatrix (rectangle) regions in an image Thanks for the suggestions! Regarding "finding squares", would you suggest MSER for that? |
| 2016-12-15 10:43:20 -0600 | asked a question | Detecting (not decoding!) datamatrix (rectangle) regions in an image I know that OpenCV doesn't provide any datamatrix decoding. That's ok. I'm currently using zxing to decode datamatrixes and it seems to work well. However, Sometimes my image may contain two or more datamatrixes. In this case zxing fails because it needs an image with a single datamatrix in it. Does anyone know how I can detect the datamatrix region? It doesn't have to be perfect as I don't mind false-positives, as long as I also get the rectangle for the actual datamatrix if there is one. I figure that this should be pretty easy with OpenCV since it is essentially trying to find a high-contrast rectangle, but I haven't been able to figure out how to do it... Any help would be appreciated! |
| 2016-07-15 09:15:58 -0600 | commented question | Improving eigenFaces by adding negative training images Hasn't anyone out there already done a comprehensive accuracy comparison of the different methods? |
| 2016-07-11 15:40:20 -0600 | commented answer | Calibrate at one resolution, remap at another resolution? Nifty. Thanks for the cleaner code. :) |
| 2016-07-11 09:08:02 -0600 | commented question | Improving eigenFaces by adding negative training images
From what I remember eigenfaces always classifies as a known person. It just gives you the most similar. You need to use some sort of confidence value (like the one it returns or something else) to decide how likely the match is. |
| 2016-07-11 09:07:28 -0600 | answered a question | Improving eigenFaces by adding negative training images
From what I remember eigenfaces always classifies as a known person. It just gives you the most similar. You need to use some sort of confidence value (like the one it returns or something else) to decide how likely the match is. |
| 2016-07-07 02:27:59 -0600 | received badge | ● Necromancer (source) |
| 2016-07-07 02:27:59 -0600 | received badge | ● Self-Learner (source) |
| 2016-07-06 12:02:27 -0600 | answered a question | meanshift termination criteria & epsilon value meaning Would still love to hear other peoples' answers to this, but for the moment, I've added a simple histogram comparison (using compareHist) to try to get a sense of the similarity between the original and the tracked object. If the similarity is less than some threshold, I assume I've lost the track. |
| 2016-07-06 07:56:05 -0600 | commented question | improving fps of face recognition by using threads Have you checked where the time is being used? I assume it is mostly going to detectMultiScale(). In this case starting a new thread won't help you with anything. Apparently this function is already parallelized (?) but I'll let someone else elaborate more about that (how does it decide how many threads to use?). |
| 2016-07-05 11:49:02 -0600 | asked a question | Meanshift - Cleaning up back projection In the OpenCV meanshift documentation, it states that:
Since I love "better results", I've been trying to do exacly what has been suggested, but so far the reults are not useable. Here is my code (where backProjection is the original back projection created by calcBackProject(): Sometimes the result is useable: the ROI is white and most of the rest of the image is black. However, for other situations, the ROI is completely black (no matter the values of MIN_AREA/MAX_AREA above). What am I doing wrong? Any code out there for cleaning up a back-projection in a generic way? Thanks! |
| 2016-07-04 13:58:04 -0600 | edited question | meanshift termination criteria & epsilon value meaning I'm wondering if someone could give an explanation of the epsilon value passed as part of the meanshift termination criteria. I've read the documentation of course, and searched around, but am still unsure of the meaning. Motivation for this question: I am trying to determine the likelihood that what meanshift found is indeed the original object of interest (i.e. that the new rectangle is similar to the previous ROI). I was surprised that, sometimes, if my original object has left the frame, meanshift identified some background noise as the new location (which, to my eyes, had nothing in common with the original ROI). Currently I'm using a max count of 10 and an epsilon of 1 for the termination criteria. I then ensure that the count returned from meanShift() is < 10, or else I discard the result. Still, it seems to terminate sooner, even when the object is gone... Thanks! |
| 2016-07-04 08:32:30 -0600 | received badge | ● Self-Learner (source) |
| 2016-07-04 08:12:03 -0600 | answered a question | Calibrate at one resolution, remap at another resolution? Got this working after posting: calibCamMatrix is the matrix generated by the calibration process (where frame had x resolution of calibWidth). newCamMatrix is the modified matrix to be passed to initUndistortRectifyMap(), along with the new resolution (newWidth/yyy) |
| 2016-07-01 14:46:53 -0600 | asked a question | Calibrate at one resolution, remap at another resolution? According to the docs, since the distortion coefficients do not depend on the resolution, I should be able to make use of the camera calibration data with a different resolution (from that which was used during calibration). Unfortunately I haven't be able to make this work. Is there an example out there that makes use of initUndistortRectifyMap() and remap() when the original camera matrix and distortion coefficients were gathered at a different resolution from the image being passed to remap() ? Thanks! |
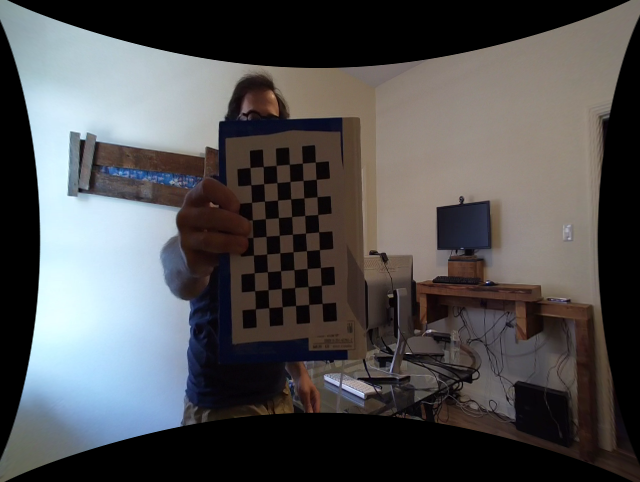
| 2016-07-01 09:13:22 -0600 | asked a question | Camera calibration and aspect ratio Hello! I am calibrating a wide-angle IP Cam. Here as an example of the image after calling remap() with the calibration data:
Lines are straight. Good. However, notice that the checkboard squares are tall. They are rectangles instead of squares. Bad. Should the calibration process have made this good? How do I correct for this? When performing the calibration (for the example posted), I am not using the CALIB_FIX_ASPECT_RATIO flag. However, I have tried it with the flag (using it correctly as per the sample) and end up with the same problem. I understand that this flag indicates that there is a known pixel-size-ratio, but if I don't provide the flag, I assumed that this would have been calculated, right? Edit: I think think this is definitely related to the camera not having square pixels (at least the resolution I was trying here), but I'm still not clear as to whether OpenCV's calibration should be able to correct for this automatically or not...? |
| 2016-06-29 03:53:45 -0600 | received badge | ● Necromancer (source) |
| 2016-06-28 11:03:10 -0600 | commented answer | VideoCapture cant read url I wasn't able to get RTSP URLs working with VideoCapture(). Also, I figured that the VLC implementation was more robust. It has been working well for me. |
| 2016-06-28 10:38:21 -0600 | edited answer | VideoCapture cant read url Not sure if this is possible using the OpenCV VideoCapture. I too needed to stream RTSP feeds, so I made use of libvlc for these. Here's some info: http://study.marearts.com/2015/09/ope... Here is the class that I created to allow for a similar interface to what you get with VideoCapture: Header: Implementation: |