Camera calibration and aspect ratio
Hello!
I am calibrating a wide-angle IP Cam. Here as an example of the image after calling remap() with the calibration data:
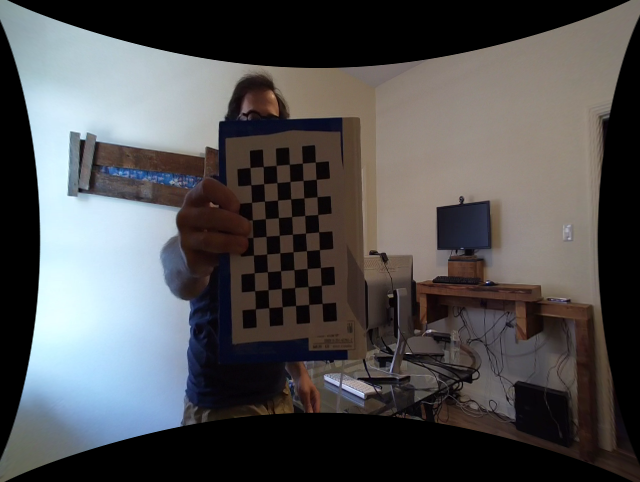
Lines are straight. Good. However, notice that the checkboard squares are tall. They are rectangles instead of squares. Bad. Should the calibration process have made this good? How do I correct for this?
When performing the calibration (for the example posted), I am not using the CALIB_FIX_ASPECT_RATIO flag. However, I have tried it with the flag (using it correctly as per the sample) and end up with the same problem. I understand that this flag indicates that there is a known pixel-size-ratio, but if I don't provide the flag, I assumed that this would have been calculated, right?
Edit: I think think this is definitely related to the camera not having square pixels (at least the resolution I was trying here), but I'm still not clear as to whether OpenCV's calibration should be able to correct for this automatically or not...?