This forum is disabled, please visit https://forum.opencv.org
| 2020-09-28 16:43:18 -0600 | received badge | ● Notable Question (source) |
| 2017-12-14 12:29:17 -0600 | received badge | ● Popular Question (source) |
| 2014-05-22 08:52:50 -0600 | asked a question | HOG person detection and setting up SVM classifiers Hello all; I am using HOG descriptors and SVM like the examples provided in OpenCV cpp samples to detect people. Following the sample, if I use: I obtain a processing rate of approximately 150ms per image, which is a good performance. The drawback is that I obtain also many false positives. I have used MIT person database (128*64 pixel images containing a person), to train a ONE CLASS SVM classifier, as I only have positive examples. I have obtained the HOG feature vector of the images (3780 values) for the 924 images in the database. I have trained the SVM as follows: CvSVMParams params; Obtaining one support vector of 3780 components. Inserting this SVM to he HOG descriptor: Problems I have:
Could anyone help me or give some advise about it? Why so slow? Thank you very much in advance, Best regards, |
| 2013-06-17 09:07:46 -0600 | received badge | ● Student (source) |
| 2013-06-17 07:51:37 -0600 | received badge | ● Editor (source) |
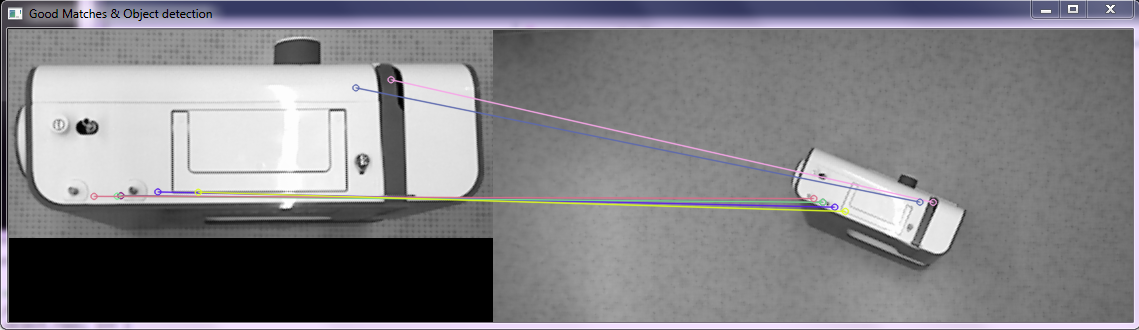
| 2013-06-17 04:30:31 -0600 | asked a question | pattern recognition to detect object position ? Hello all; I am trying to program a pattern recognition system using the features2d module also with nonfree module. My main objective is to detect the position of an object in a scene, given 5 models of different positions available. This algorithm must work translation, rotation and scale independent. I am using Surf detector as a first try, adjusting its parameters, and I obtain correct matches when the postion of the model and the position in the scene coincide. This can be seen in the following image:
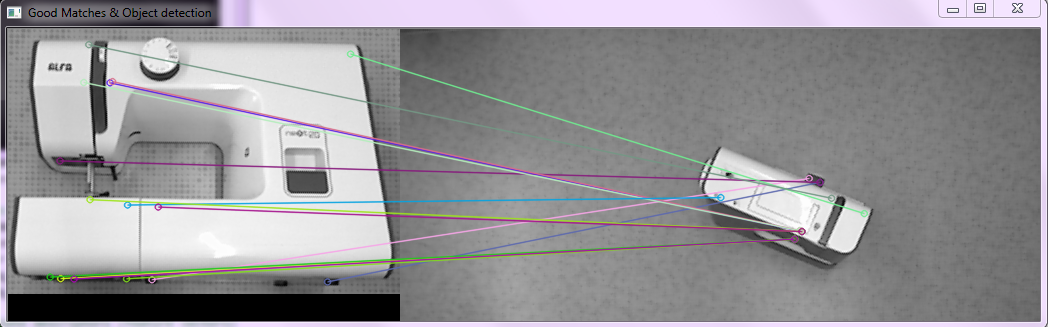
however, when I use the same algorithm with another position, I also obtain matches which obviously are incorrect:
I want to detect the position of the object in the scene, but if I obtain matches in all the cases, it is impossible to know which is the real position. Is this approach correct for what I am intending to do? Any other good idea? Thank you all very much in advance, Best regards, Alberto PD: I attach the code: |