pattern recognition to detect object position ?

Hello all;
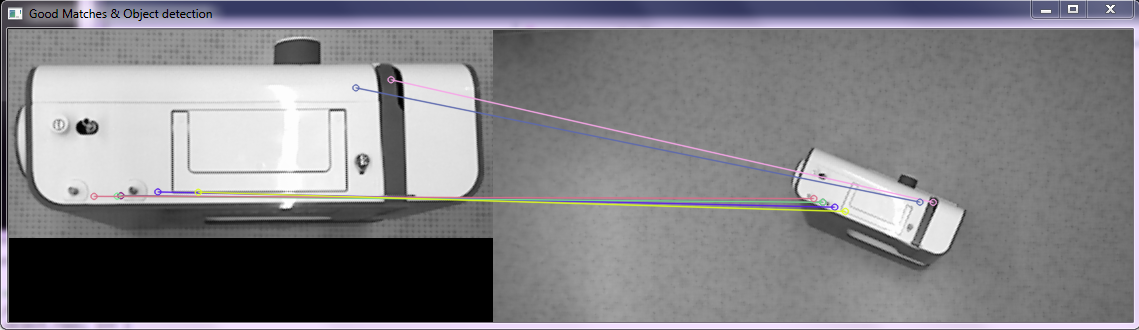
I am trying to program a pattern recognition system using the features2d module also with nonfree module. My main objective is to detect the position of an object in a scene, given 5 models of different positions available. This algorithm must work translation, rotation and scale independent. I am using Surf detector as a first try, adjusting its parameters, and I obtain correct matches when the postion of the model and the position in the scene coincide. This can be seen in the following image:
however, when I use the same algorithm with another position, I also obtain matches which obviously are incorrect:
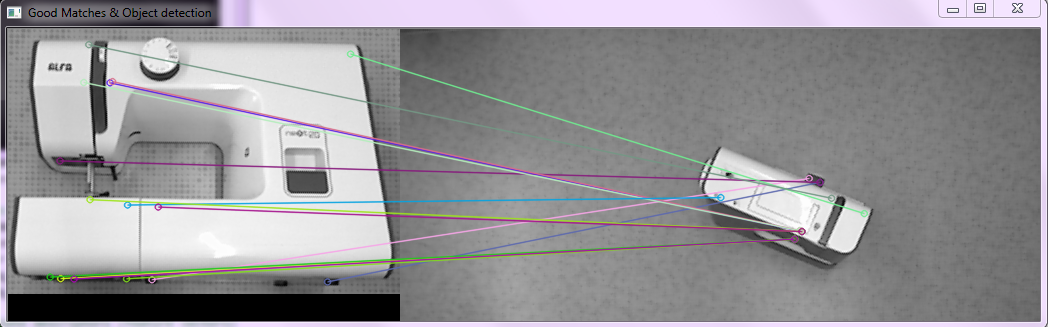
I want to detect the position of the object in the scene, but if I obtain matches in all the cases, it is impossible to know which is the real position. Is this approach correct for what I am intending to do? Any other good idea?
Thank you all very much in advance,
Best regards, Alberto
PD: I attach the code:
int main( int argc, char** argv )
{
Mat img_object = imread( "Pos2Model_Gray.png", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_scene = imread( "Kinect_grayscale_36.png", CV_LOAD_IMAGE_GRAYSCALE );
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 800;
std::vector<KeyPoint> keypoints_object, keypoints_scene;
SurfFeatureDetector detector(minHessian);
detector.detect(img_object, keypoints_object);
detector.detect(img_scene, keypoints_scene);
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( img_object, keypoints_object, descriptors_object );
extractor.compute( img_scene, keypoints_scene, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
//-- Quick calculation of max and min distances between keypoints
double max_dist = 0; double min_dist = 100;
for( int i = 0; i < descriptors_object.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_object.rows; i++ )
if( matches[i].distance < 1.5 *min_dist )
good_matches.push_back( matches[i]);
Mat img_matches;
drawMatches( img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for( int i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
Mat H = findHomography( obj, scene, CV_RANSAC );
//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0); obj_corners[1] = cvPoint( img_object.cols, 0 );
obj_corners[2] = cvPoint( img_object.cols, img_object.rows ); obj_corners[3] = cvPoint( 0, img_object.rows );
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
//-- Show detected matches
imshow( "Good Matches & Object detection", img_matches );
waitKey(0);
return 0;
}
It would help us to see your actual code for matching the keypoints.