|
2017-02-08 03:56:28 -0600
| received badge | ● Supporter
(source)
|
|
2014-10-25 13:44:34 -0600
| received badge | ● Student
(source)
|
|
2014-04-09 05:40:18 -0600
| asked a question | Average histogram of multiple histograms Hallo, I calculated H-S Histograms of 100 images for the same object which located in different environment conditions, I need now one average histogram of these 100 histograms! vector<matnd> histImages;
let's assume that we have histImages[i] ; i=0 to 99 number of histograms Thank you in advance // hue varies from 0 to 179, see cvtColor
float hranges[] = { 0, 180 };
// saturation varies from 0 (black-gray-white) to
// 255 (pure spectrum color)
float sranges[] = { 0, 256 };
const float* ranges[] = { hranges, sranges };
MatND hist;
// we compute the histogram from the 0-th and 1-st channels
int channels[] = {0, 1};
calcHist( &hsv, 1, channels, Mat(), // do not use mask
hist, 2, histSize, ranges,
true, // the histogram is uniform
false );
double maxVal=0;
minMaxLoc(hist, 0, &maxVal, 0, 0);
int scale = 10;
Mat histImg = Mat::zeros(sbins*scale, hbins*10, CV_8UC3);
for( int h = 0; h < hbins; h++ )
for( int s = 0; s < sbins; s++ )
{
float binVal = hist.at<float>(h, s);
int intensity = cvRound(binVal*255/maxVal);
rectangle( histImg, Point(h*scale, s*scale),
Point( (h+1)*scale - 1, (s+1)*scale - 1),
Scalar::all(intensity),
CV_FILLED );
}
|
|
2014-03-31 06:26:55 -0600
| commented answer | vector of vectors This not work because if you have in first file 20 images and in the second 10 images at the end you will get FilesVector[30] (with 30 images)
but what I need is FilesVector[ vict(20) , vict(10)] so finally when I call FilesVector[0] this mean that I call the images in the first file |
|
2014-03-31 05:11:07 -0600
| asked a question | vector of vectors Hello, I am looping through multiple files to read images inside each one, I got the files paths and number of images in each file: //here is part of the code: vector <Mat>& Images;
for( size_t i = 0; i < ImagesCounts.size(); i++ )
{
Mat img = imread( filename, 1 ); //
Images.push_back( img );
}
I read by this code the images of the first file so: Images[0]= img1 , Images[1]=img2 ..... I am now in the second loop (which has different filename and ImageCounts) and I need to save first vector of Images in a global vector.. this mean: FilesVector(vect[1],vect[2]......vect[N]); N is number of files where: vect[1] should include the images of the first file vect[2] should include the images of the second file So how I can define the global vector and push the images I have in the first loop to vect[1].. ? I tried this code before going to the second loop but didn't work! vector<vector<Mat>> FilesVector;
FilesVector[0]=Images;
|
|
2014-03-03 08:17:25 -0600
| received badge | ● Scholar
(source)
|
|
2014-02-25 01:25:55 -0600
| asked a question | Remove black borders after undistortion Hallo, after calibration and undistortion I have this image and I need to remove the black borders(crop the image)only depending on the camera parameters which I have in the output XML file so how I can define the region of interest? 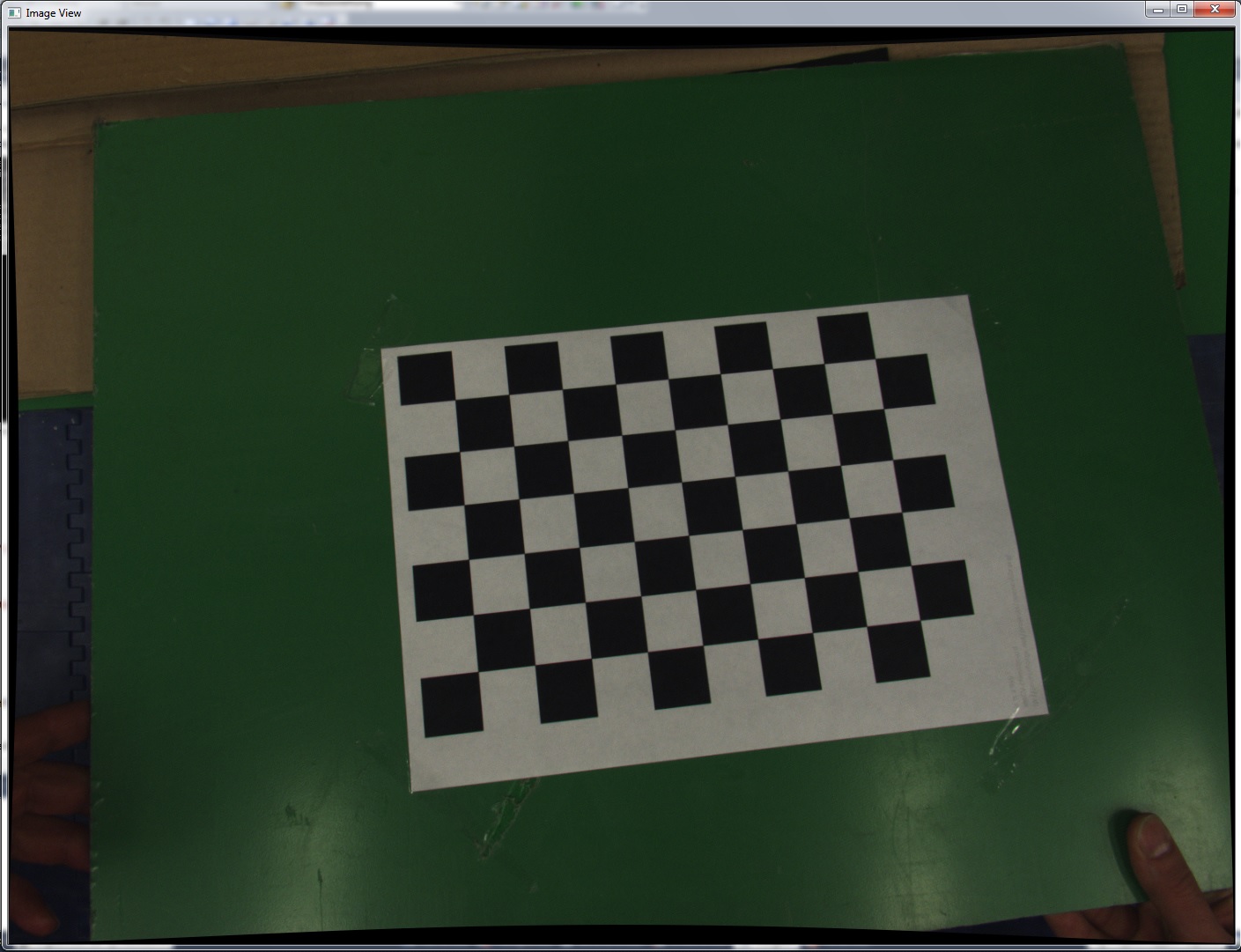
<Camera_Matrix type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>
1.3117098501208040e+003 0. 6.9550000000000000e+002 0.
1.3117098501208040e+003 520. 0. 0. 1.</data></Camera_Matrix>
<Distortion_Coefficients type_id="opencv-matrix">
<rows>5</rows>
<cols>1</cols>
<dt>d</dt>
<data>
-2.1400301530776253e-001 4.6169624608789456e-002 0. 0.
1.8396036701643875e-001</data></Distortion_Coefficients>
<Avg_Reprojection_Error>3.6924789370054928e-001</Avg_Reprojection_Error>
<Per_View_Reprojection_Errors type_id="opencv-matrix">
<rows>16</rows>
<cols>1</cols>
<dt>f</dt>
<data>
3.56106251e-001 3.05902541e-001 3.21639299e-001 3.97623330e-001
4.79688823e-001 3.31597805e-001 2.92068005e-001 3.66955608e-001
3.19793940e-001 6.19786203e-001 4.36506212e-001 3.26359451e-001
3.68108034e-001 2.78367579e-001 2.72553772e-001 2.62321293e-001</data></Per_View_Reprojection_Errors>
<!-- a set of 6-tuples (rotation vector + translation vector) for each view -->
<Extrinsic_Parameters type_id="opencv-matrix">
<rows>16</rows>
<cols>6</cols>
<dt>d</dt>
<data>
8.2524798674623173e-002 1.1957588136538763e-002
-5.2492873372617030e-002 -8.7280621973657318e+001
-3.9451553914075618e+001 5.7852359123958058e+002
-2.0676032091414645e-001 -6.0286278602077602e-002 ...
<Image_points type_id="opencv-matrix">
<rows>16</rows>
<cols>54</cols>
<dt>"2f"</dt>
<data>
4.99537811e+002 4.31490295e+002 5.57311035e+002 4.28100739e+002
6.15545166e+002 4.24772125e+002 6.74481750e+002 4.21481506e+002
7.33297974e+002 4.18324432e+002 7.91958740e+002 4.15214600e+002
8.51019897e+002 4.12198181e+002 9.09479858e+002 4.09300568e+002
9.67362793e+002 4.06486938e+002 5.02951508e+002 4.89633362e+002
...
|
|
2014-02-19 03:48:49 -0600
| asked a question | create Header file of Calibration sample Hello, I need to create Header file mainCalib.h from the mainCalib.cpp file the mainCalib.cpp file include calibration Sample of opencv .. so finally I can execute the program from main.cpp file: this is mainCalib.cpp file: #include <iostream>
#include <sstream>
#include <time.h>
#include <stdio.h>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
#ifndef _CRT_SECURE_NO_WARNINGS
# define _CRT_SECURE_NO_WARNINGS
#endif
#include "mainCalib.h"
using namespace cv;
using namespace std;
void help()
{
cout << "This is a camera calibration sample." << endl
<< "Usage: calibration configurationFile" << endl
<< "Near the sample file you'll find the configuration file, which has detailed help of "
"how to edit it. It may be any OpenCV supported file format XML/YAML." << endl;
}
class Settings
{
public:
Settings() : goodInput(false) {}
enum Pattern { NOT_EXISTING, CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID };
enum InputType {INVALID, CAMERA, VIDEO_FILE, IMAGE_LIST};
void write(FileStorage& fs) const //Write serialization for this class
{
fs << "{" << "BoardSize_Width" << boardSize.width
<< "BoardSize_Height" << boardSize.height
<< "Square_Size" << squareSize
<< "Calibrate_Pattern" << patternToUse
<< "Calibrate_NrOfFrameToUse" << nrFrames
<< "Calibrate_FixAspectRatio" << aspectRatio
<< "Calibrate_AssumeZeroTangentialDistortion" << calibZeroTangentDist
<< "Calibrate_FixPrincipalPointAtTheCenter" << calibFixPrincipalPoint
<< "Write_DetectedFeaturePoints" << bwritePoints
<< "Write_extrinsicParameters" << bwriteExtrinsics
<< "Write_outputFileName" << outputFileName
<< "Show_UndistortedImage" << showUndistorsed
<< "Input_FlipAroundHorizontalAxis" << flipVertical
<< "Input_Delay" << delay
<< "Input" << input
<< "}";
}
void read(const FileNode& node) //Read serialization for this class
{
node["BoardSize_Width" ] >> boardSize.width;
node["BoardSize_Height"] >> boardSize.height;
node["Calibrate_Pattern"] >> patternToUse;
node["Square_Size"] >> squareSize;
node["Calibrate_NrOfFrameToUse"] >> nrFrames;
node["Calibrate_FixAspectRatio"] >> aspectRatio;
node["Write_DetectedFeaturePoints"] >> bwritePoints;
node["Write_extrinsicParameters"] >> bwriteExtrinsics;
node["Write_outputFileName"] >> outputFileName;
node["Calibrate_AssumeZeroTangentialDistortion"] >> calibZeroTangentDist;
node["Calibrate_FixPrincipalPointAtTheCenter"] >> calibFixPrincipalPoint;
node["Input_FlipAroundHorizontalAxis"] >> flipVertical;
node["Show_UndistortedImage"] >> showUndistorsed;
node["Input"] >> input;
node["Input_Delay"] >> delay;
interprate();
}
void interprate()
{
goodInput = true;
if (boardSize.width <= 0 || boardSize.height <= 0)
{
cerr << "Invalid Board size: " << boardSize.width << " " << boardSize.height << endl;
goodInput = false;
}
if (squareSize <= 10e-6)
{
cerr << "Invalid square size " << squareSize << endl;
goodInput = false;
}
if (nrFrames <= 0)
{
cerr << "Invalid number of frames " << nrFrames << endl;
goodInput = false;
}
if (input.empty()) // Check for valid input
inputType = INVALID;
else
{
if (input[0] >= '0' && input[0] <= '9')
{
stringstream ss(input);
ss >> cameraID;
inputType = CAMERA;
}
else
{
if (readStringList(input, imageList))
{
inputType = IMAGE_LIST;
nrFrames = (nrFrames < (int)imageList.size()) ? nrFrames : (int)imageList.size();
}
else
inputType = VIDEO_FILE;
}
if (inputType == CAMERA)
inputCapture.open(cameraID);
if (inputType == VIDEO_FILE)
inputCapture.open(input);
if (inputType != IMAGE_LIST && !inputCapture.isOpened())
inputType = INVALID;
}
if (inputType == INVALID)
{
cerr << " Inexistent input: " << input;
goodInput = false;
}
flag = 0;
if(calibFixPrincipalPoint) flag |= CV_CALIB_FIX_PRINCIPAL_POINT;
if(calibZeroTangentDist) flag |= CV_CALIB_ZERO_TANGENT_DIST;
if(aspectRatio) flag |= CV_CALIB_FIX_ASPECT_RATIO;
calibrationPattern = NOT_EXISTING;
if (!patternToUse.compare("CHESSBOARD")) calibrationPattern = CHESSBOARD;
if (!patternToUse.compare("CIRCLES_GRID")) calibrationPattern = CIRCLES_GRID;
if (!patternToUse.compare("ASYMMETRIC_CIRCLES_GRID")) calibrationPattern = ASYMMETRIC_CIRCLES_GRID;
if (calibrationPattern == NOT_EXISTING)
{
cerr << " Inexistent camera calibration mode: " << patternToUse << endl;
goodInput = false;
}
atImageList = 0;
}
Mat nextImage()
{
Mat result;
if( inputCapture.isOpened() )
{
Mat view0;
inputCapture >> view0;
view0.copyTo(result);
}
else if( atImageList < (int)imageList.size() )
result = imread(imageList[atImageList++], CV_LOAD_IMAGE_COLOR);
return result;
}
static bool readStringList( const string& filename, vector<string>& l )
{
l.clear();
FileStorage fs(filename, FileStorage::READ);
if( !fs.isOpened() )
return false;
FileNode n = fs.getFirstTopLevelNode();
if( n.type() != FileNode::SEQ )
return false;
FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((string)*it);
return true;
}
public:
Size boardSize; // The size of the board -> Number of items by width and ...
(more) |
|
2014-02-19 01:08:31 -0600
| commented answer | Camera Undistortion Thank you for this explaination |
|
2014-02-14 06:02:47 -0600
| asked a question | Camera Undistortion Hello, I have the camera calibration Parameters as followings, and it works well for undistortion function, how I can Transfer these parametrs if I changed the angle of camera axes 90 degree to the left or the right?! uint w= 1040, h= 1392;
double disto[5]= { -0.205410121, 0.091357057, 0.000740608, 0.000895488, 0.053117702, }; cv::Mat cameraMatrix;
cv::Mat distCoeffs;
cv::Mat cameraIdeal;
cv::Mat ROTATION(3,3,CV_64F);
ocv_setcam(cameraMatrix, 1286.635225995, 1287.007162383, 520, 730.910560759);
ocv_setcam(cameraIdeal, 1288, 1288, 520, 762);
vect2ocv(distCoeffs, disto,5);
assert(ROTATION.isContinuous());
double * R= ((double*) ROTATION.data);
R[0]= 1.0; // col=0 auf row=0
R[1]= 0.0;
R[2]= 0.0;
R[3]= 0.0;
R[4]= 1.0;
R[5]= 0.0;
R[6]= 0.0;
R[7]= 0.0;
R[8]= 1.0;
|
|
2013-05-15 08:38:57 -0600
| answered a question | From 3d point cloud to disparity map Hello, I need to know if you got your coordinate system and translate the output of ReprojectImageTo3D
function as I am working in the same topic, I have like this result X coordinate values always between 350 - 450
Y coordinate values always between -80 to -30
z coordinates values always between 230 - 280 and sometimes 10000 when so far Thank you for your help |
|
2013-05-15 03:34:22 -0600
| asked a question | StereoSGBM algorithm Hello, the result of 3d reprojection using StereoSGBM algorithm is the X,Y,Z coordinates of each pixel in the depth image. public void Computer3DPointsFromStereoPair(Image<Gray, Byte> left, Image<Gray, Byte> right, out Image<Gray, short> disparityMap, out MCvPoint3D32f[] points)
{
points = PointCollection.ReprojectImageTo3D(disparityMap, Q);
}
by taking the first element of this result: points[0] = { X= 414.580017 Y= -85.03029 Z= 10000.0 } I'm confused here!! to which pixel this point refers to ? and why it is not like this X=0,Y=0,Z=10000.0! 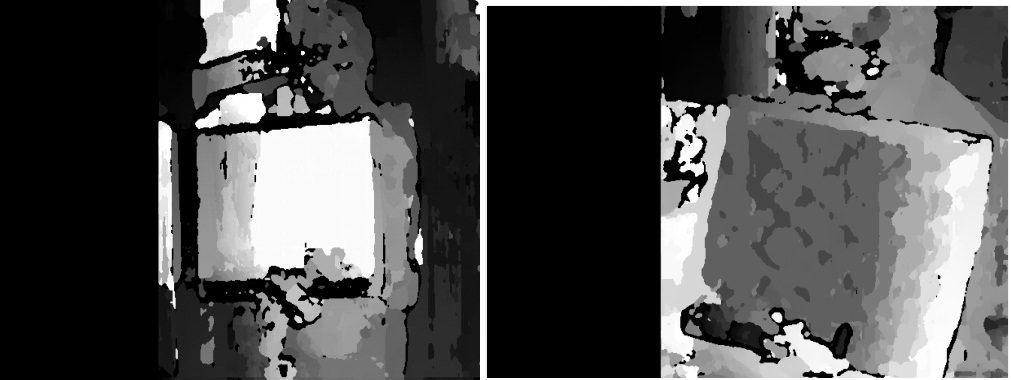
|
|
2013-05-14 05:47:13 -0600
| asked a question | Stereo imaging & Calibration Hello, the result of 3d reprojection function is a matrix that has X,Y,Z of each pixel. let's take the first element of this matrix points[0] which has:
X= 414.580017
Y= -85.03029
Z= 10000.0 what is the unit here and where I can find this pixel in the image ?
and why it is not like this X=0,Y=0,Z=10000.0! points = PointCollection.ReprojectImageTo3D(disparityMap, Q);
|
|
2013-04-24 02:45:57 -0600
| asked a question | Capture Class & Axis Camera Hello, I can connect to robot Axis cameras, but I can not set Capture class to get frames from these Camera devices ? or is there any other method to do that! this.Video_Source1 = new AxAXISMEDIACONTROLLib.AxAxisMediaControl();
this.Video_Source2 = new AxAXISMEDIACONTROLLib.AxAxisMediaControl();
Video_Source1.MediaURL = CompleteURL("192.168.0.57:8083", "mjpeg");
Video_Source1.Play();
Video_Source2.MediaURL = CompleteURL("192.168.0.58:8082", "mjpeg");
Video_Source2.Play();
_Capture1 = new Capture(here is the problem);
_Capture2 = new Capture(here is the problem);
_Capture1.ImageGrabbed += ProcessFrame;
_Capture1.Start();
}
private void ProcessFrame(object sender, EventArgs arg)
{
Image<Bgr, Byte> frame_S1 = _Capture1.RetrieveBgrFrame();
Image<Bgr, Byte> frame_S2 = _Capture2.RetrieveBgrFrame();
.
.
.
}
|
|
2013-04-24 02:20:28 -0600
| received badge | ● Editor
(source)
|
|
2013-04-24 02:14:34 -0600
| asked a question | Capture Class & Axis Camera Hello, I can connect to robot Axis cameras but how I can set Capture class to get frames from these Camera devices ? or is there any other method to do that! Video_Source1.MediaURL = CompleteUR ("192.168.0.57:8083", "mjpeg");
Video_Source1.Play(); Video_Source2.MediaURL = CompleteURL("192.168.0.58:8082", "mjpeg");
Video_Source2.Play(); _Capture1 = new Capture(here is the problem);
_Capture2 = new Capture(here is the problem); _Capture1.ImageGrabbed += ProcessFrame;
_Capture1.Start();} private void ProcessFrame(object sender, EventArgs arg) { Image<bgr> frame_S1 = _Capture1.RetrieveBgrFrame();
Image<bgr> frame_S2 = _Capture2.RetrieveBgrFrame();
.
.
.
} |