This forum is disabled, please visit https://forum.opencv.org
| 2019-11-11 08:30:53 -0600 | received badge | ● Popular Question (source) |
| 2019-01-21 02:13:18 -0600 | received badge | ● Popular Question (source) |
| 2016-02-04 06:01:05 -0600 | commented answer | How does opencv convert a bgr image to greyscale? Thank you for clarification! |
| 2016-02-04 05:15:56 -0600 | asked a question | How does opencv convert a bgr image to greyscale? Hi, I have a simple question. I read about the cvtColor function in the docs. I would like to know how OpenCV converts a BGR image to greyscale image. According to the docs it uses the following formular. Is it correct, that the Y stands for the alpha channel and all values in this channel will be replaced by 0.299? Thanks in advance! |
| 2016-01-29 02:26:25 -0600 | commented question | Are my Points coplanar? Thank you! |
| 2016-01-28 11:38:49 -0600 | commented question | Are my Points coplanar? Thanks for the sources. Am I understanding you correct, that you say, that my Points are coplanar but it works anyway because of a closed form solution? |
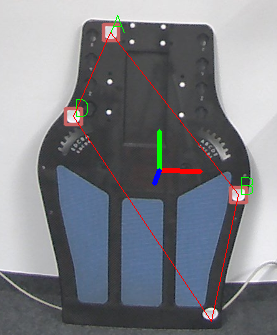
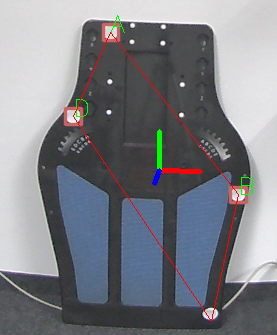
| 2016-01-28 04:14:56 -0600 | asked a question | Are my Points coplanar? Hi, A while ago I worked on pose estimation. I also asked a question about it to make it work. (old question) Today I read the following about POSIT (solvePNP) in Learning OpenCV 1st Edition
This is my image For me this points appear to be coplanar, since they are all in the same plane? Could someone explain to me why it works anyway? |
| 2016-01-25 12:25:48 -0600 | commented answer | Why is the color of all squares of a charuco board black? (Version 3.1) Thank you very much! |
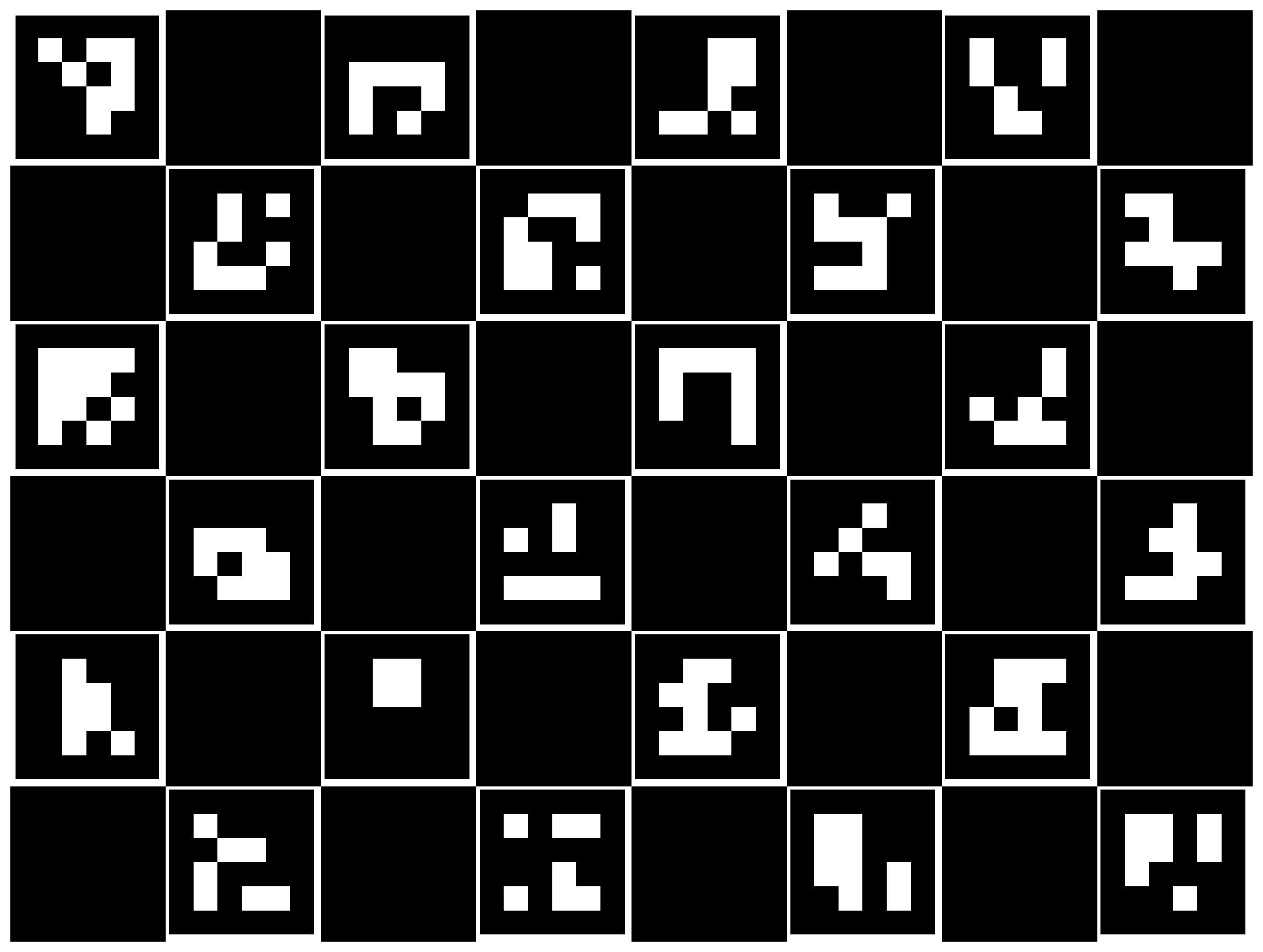
| 2016-01-23 11:23:57 -0600 | asked a question | Why is the color of all squares of a charuco board black? (Version 3.1) Hi, I created a charuco board with the example application from the aruco module (create_board_charuco.cpp). I am suprised that the result is a board where all squares are black. In the las verion I used, I got a board with black and white squares. Why has it changed? Is it better or just a mistake? My generated board: C:\fakepath\board.jpg What I expected: C:\fakepath\charucoboard.jpg |
| 2015-12-18 03:46:50 -0600 | received badge | ● Enthusiast |
| 2015-12-14 07:00:57 -0600 | received badge | ● Student (source) |
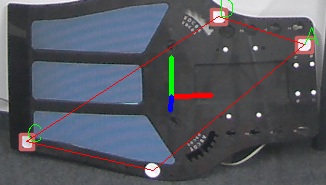
| 2015-12-14 02:34:33 -0600 | asked a question | Pose Estimation: Where is my error in reasoning? Hi, I am trying to do pose estimation. But I am clearly doing something wrong. Let's say I have a pattern consisting of 4 Markers (A,B,C,D). Each of these markers has an image coordinate and a pattern coordinate. The origin of the pattern is the center of the polygon.
The image coordinates (x/y) are the following. (In a 1280x960 image)
Now it rotates by 90 degrees, but my coordinate system does not rotate with the pattern. I am wondering what is wrong? Is it because the Z coordinate is always 0?
I am using solvePnP like this Drawing the axis |
| 2015-10-08 09:52:18 -0600 | answered a question | How to keep tracking one object forever? I know it's a late answer but maybe it's still helpfull. You could try it with the object tracking algorithm provied by DLIB Checkout this Blogpost http://blog.dlib.net/2015/02/dlib-181... |
| 2015-09-25 03:30:02 -0600 | received badge | ● Editor (source) |
| 2015-09-25 02:31:08 -0600 | received badge | ● Supporter (source) |
| 2015-09-25 02:30:07 -0600 | commented answer | Has createBackgroundSubtractorMOG been removed? Thank you! |
| 2015-09-25 02:29:31 -0600 | received badge | ● Scholar (source) |
| 2015-09-25 02:02:15 -0600 | asked a question | Has createBackgroundSubtractorMOG been removed? Hi, I did the openCV Background Subtraction tutorial, which is described here. First the complete source code is listed, in which createBackgroundSubtractorMOG is not used. But in the Explanation part it is described. That's obviously an error, but it didn`t take me long to figure it out. Hower now I want to use createBackgroundSubtractorMOG instead of createBackgroundSubtractorMOG2, but it seems that this method has been complitly removed. Does somybody know if this is true and if it is, why the method has been removed? PS: I am using opencv 3.0.0 Thanks and Greets RVQ [Solved][Note] I had some errors building opencv_contrib. However I just wanted to try BackgroundSubtractorMOG. So I just copied the .cpp and header files in my Project and builded it again, which worked fine. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}