This forum is disabled, please visit https://forum.opencv.org
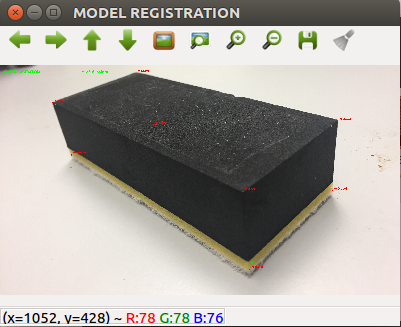
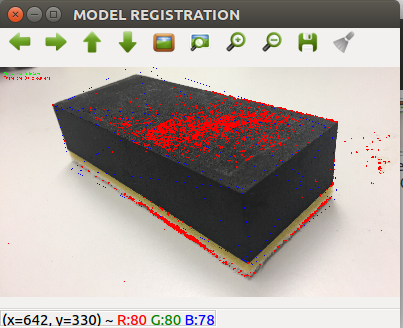
| 2017-06-14 15:37:29 -0600 | asked a question | How to use real_time_pose_estimation Hi everyone, I am trying to use real_time_pose_estimation module in https://github.com/opencv/opencv/tree... I generated cpp-tutorial-pnp_detection and cpp-tutorial-pnp_registration and use these in my own object. However, the result video always cannot generate the correct solution. My 3D textured model of the object to be detected is shown following:
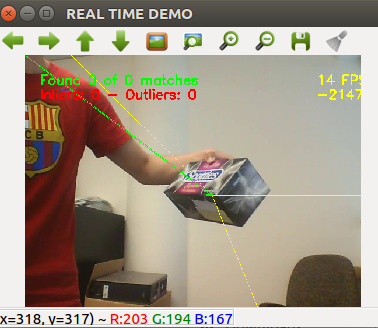
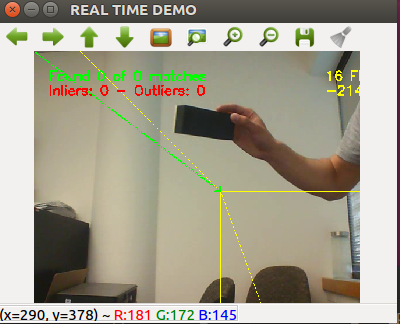
However, my results always cannot detect the object as following:
Does there someone have experience that know the exact problem is? I will be appreciated for your ideas. |
| 2017-06-14 14:46:00 -0600 | commented question | executable file of Opencv_contrib Yes, I have installed all the dependencies shown in http://docs.opencv.org/3.1.0/db/db8/t... |
| 2017-06-14 14:31:11 -0600 | commented question | executable file of Opencv_contrib There is no cmake_cache.txt file in Opencv or Opencv_contrib |
| 2017-06-14 13:47:01 -0600 | asked a question | executable file of Opencv_contrib Hi everyone, I am trying to use sfm module in Opencv_contrib. I following instructions in https://github.com/opencv/opencv_contrib to make and install extra module. It was successful. However, I cannot find any executable file like example_sfm_scene_reconstruction after sudo make install. Meanwhile, when I try to cmake sfm module in opencv_contrib directly, it gives me the following error: :~/opencv_contrib-3.2.0/modules/sfm/build$ cmake .. -- No preference for use of exported gflags CMake configuration set, and no hints for include/library directories provided. Defaulting to preferring an installed/exported gflags CMake configuration if available. -- Failed to find installed gflags CMake configuration, searching for gflags build directories exported with CMake. -- Failed to find an installed/exported CMake configuration for gflags, will perform search for installed gflags components. -- Found installed version of Eigen: /usr/lib/cmake/eigen3 -- Found required Ceres dependency: Eigen version 3.2.92 in /usr/include/eigen3 -- Found required Ceres dependency: glog -- Failed to find installed gflags CMake configuration, searching for gflags build directories exported with CMake. -- Failed to find an installed/exported CMake configuration for gflags, will perform search for installed gflags components. -- Found required Ceres dependency: gflags -- Found Ceres version: 1.13.0 installed in: /usr/local with components: [LAPACK, SuiteSparse, SparseLinearAlgebraLibrary, CXSparse, SchurSpecializations, OpenMP] -- Checking SFM deps... TRUE -- Module opencv_sfm disabled because the following dependencies are not found: Eigen CMake Error at CMakeLists.txt:37 (ocv_module_disable): Unknown CMake command "ocv_module_disable". CMake Warning (dev) in CMakeLists.txt: No cmake_minimum_required command is present. A line of code such as should be added at the top of the file. The version specified may be lower if you wish to support older CMake versions for this project. For more information run "cmake --help-policy CMP0000". This warning is for project developers. Use -Wno-dev to suppress it. -- Configuring incomplete, errors occurred! See also "/home/rmal/opencv_contrib-3.2.0/modules/sfm/build/CMakeFiles/CMakeOutput.log". See also "/home/rmal/opencv_contrib-3.2.0/modules/sfm/build/CMakeFiles/CMakeError.log". Could someone give me some ideas? Any ideas will be appreciated. |
| 2017-06-13 17:05:32 -0600 | commented question | Unable to run programs of SFM (Structure From Motion) module I tried cmake -DEIGEN_INCLUDE_PATH=/usr/include/eigen3 -DEIGEN_INCLUDE_DIR=/usr/include/eigen3 .. and cmake -DOPENCV_EXTRA_MODULES_PATH=~/opencv_contrib-3.2.0/modules -DEIGEN_INCLUDE_PATH=/usr/include/eigen3/ .. Both of them give me the same error :( |
| 2017-06-13 15:26:34 -0600 | commented question | Unable to run programs of SFM (Structure From Motion) module i already added set(EIGEN_INCLUDE_PATH ${EIGEN_INCLUDE_PATH} $/usr/include/eigen3) in line 26. But it still give me this error. I have checked /usr/include/eigen3, eigen3 exists. |
| 2017-06-13 14:55:55 -0600 | commented question | Unable to run programs of SFM (Structure From Motion) module I used opencv-3.2.0 and opencv_contrib-3.2.0. I also meet this error -- Module opencv_sfm disabled because the following dependencies are not found: Eigen CMake Error at CMakeLists.txt:35 (ocv_module_disable): Unknown CMake command "ocv_module_disable". However, I already install Eigen 3.2.92 |
| 2017-06-13 14:31:19 -0600 | commented question | StructureFromMotion ExploringSfMExec to obtain 3D textured object Thanks! I will think about it. |
| 2017-06-13 14:22:58 -0600 | commented question | StructureFromMotion ExploringSfMExec to obtain 3D textured object I will check this. Could this program store information in YAML file? |
| 2017-06-13 14:10:41 -0600 | asked a question | StructureFromMotion ExploringSfMExec to obtain 3D textured object Hi everyone, I am using https://github.com/MasteringOpenCV/co... to 3D textured object. I run the code successfully and get the final 3D figure in Sfmtoykibrary Viewe window. However, I want to obtain the 3D points and the descriptors stored in different lists in a file with YAML file. I cannot find how to change the code in https://github.com/MasteringOpenCV/co... to obtain the results I want. Could anyone give me some ideas? Any suggestions is appreciate. Thanks in advance. |
| 2017-06-08 12:47:50 -0600 | commented question | cpp-tutorial-pnp_registration cannot detect object exactly Moreover, even I use the original picture and ply file from opencv to obtain the yml file. The cpp-tutorial-pnp_detection give me the same result. So that means created yml file is not good enough to use. |
| 2017-06-08 11:17:14 -0600 | commented question | cpp-tutorial-pnp_registration cannot detect object exactly I have tried other objects with more pictures, but it still gives me the result. |
| 2017-06-08 11:15:46 -0600 | received badge | ● Enthusiast |
| 2017-06-07 15:03:34 -0600 | asked a question | cpp-tutorial-pnp_registration cannot detect object exactly Hi every one, I am using cpp-tutorial-pnp_registration (location is /opencv-3.2.0/samples/cpp/) to detect my object, then i am trying to use cpp-tutorial-pnp_detection to do Real Time pose estimation. I have already build ply model of my object, but when I try to use cpp-tutorial-pnp_registration to build my yml model, it always cannot detect my object clearly according to the points I set. My setting points (red points) are shown below:
And it gives me the following result:
When I run cpp-tutorial-pnp_detection, it cannot detect my object as following:
However, I do not know what the problem exactly is. Could anyone give me some ideas? I will be applicate for your help. Thanks in advance. |
| 2017-06-06 11:29:54 -0600 | commented question | cpp-tutorial-pnp_registration throw error Yes, it fixed. Thanks! i will update it. |
| 2017-06-05 14:56:34 -0600 | received badge | ● Editor (source) |
| 2017-06-05 14:55:53 -0600 | commented question | cpp-tutorial-pnp_registration throw error I use ubuntu 16.04 and I can attach my screen shot of my pc. |
| 2017-06-05 14:31:18 -0600 | commented question | cpp-tutorial-pnp_registration throw error i check the picture in the window, it is black and does not show the box figure. |
| 2017-06-05 14:27:29 -0600 | commented question | cpp-tutorial-pnp_registration throw error Thanks for your quick reply. after I run ./cpp-tutorial-pnp_registration, the window is closed quickly and I don't have time to clic in the window. |
| 2017-06-05 13:45:28 -0600 | asked a question | cpp-tutorial-pnp_registration throw error Hi everyone, I am trying to use cpp-tutorial-pnp_registration in opencv sample code whose location is /home/*/opencv-3.2.0/samples/cpp/tutorial_code/calib3d/real_time_pose_estimation/src/main_registration.cpp I just try to use opencv original data resized_IMG_3875.JPG and box.ply to get textured 3D model (yml file), however, opencv throw the following error for me: I am not sure what the problem is and could you give me some idea? Any idea will be appreciate. Thanks in advance. |
| 2017-06-01 13:45:48 -0600 | commented question | How to use cpp-tutorial-pnp_detection in real time camera Yes, i think so. Thanks for quick reply |
| 2017-06-01 13:20:29 -0600 | asked a question | How to use cpp-tutorial-pnp_detection in real time camera Hi, I tried to use cpp-tutorial-pnp_detection in opencv sample code. I compile it successfully and can use in the box video, which is provided in opencv master. However, I know cpp-tutorial-pnp_detection can be used in real time camera but I cannot find information about how to use it. Has someone used in that way? Could you please give me some ideas? Thanks in advance |
| 2017-04-25 12:09:48 -0600 | commented question | OpenCV ROI on Real time camera The camera shows nothing about the picture, looks like I didn't set ROI in the camera and I didn't input the picture. |
| 2017-04-24 20:22:00 -0600 | commented question | OpenCV ROI on Real time camera If i donot use cv::imshow("ir", irmat / 4500.0f); my ir information cannot change successfully.;At this moment, my ir information can be shown very well in real time camera. Additionally, I cannot understand why I should used maximum value of mat to set ROI? Could you please explain it more clearly? Thanks in advance |
| 2017-04-24 16:54:34 -0600 | asked a question | OpenCV ROI on Real time camera I am trying to set ROI in real time camera and copy a picture in the ROI. However, I tried many methods from Internet but it is still unsuccessful. Part of my code is shown below: My real time camera can show the video normally. I used rectangle(irmat,r,Scalar(0,255,0),2); in my code, the rectangle can be shown successfully in the real time camera. But the picture is unsuccessful. And no bugs in my program, but the picture cannot be shown in the ROI. Does anyone have some ideas? Any help is appreciate. |