How to use real_time_pose_estimation
Hi everyone,
I am trying to use real_time_pose_estimation module in https://github.com/opencv/opencv/tree...
I generated cpp-tutorial-pnp_detection and cpp-tutorial-pnp_registration and use these in my own object.
However, the result video always cannot generate the correct solution.
My 3D textured model of the object to be detected is shown following:


However, my results always cannot detect the object as following:
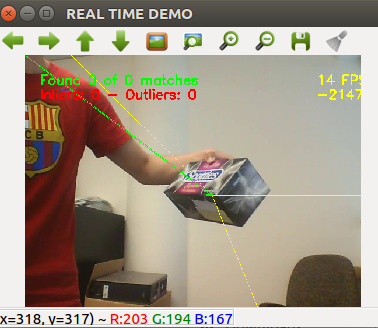
Does there someone have experience that know the exact problem is? I will be appreciated for your ideas.
add a comment