I'm studying hand-eye calibration and trying to use calibrateHandEye function in opencv.
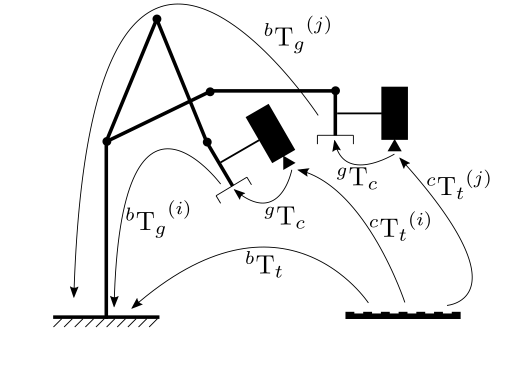
I found the reference manual as below and calibrateHandEye function seems to be purposed for getting the homogeneous matrix between moving camera and robot end tool(Hand-in-Eye calibration).
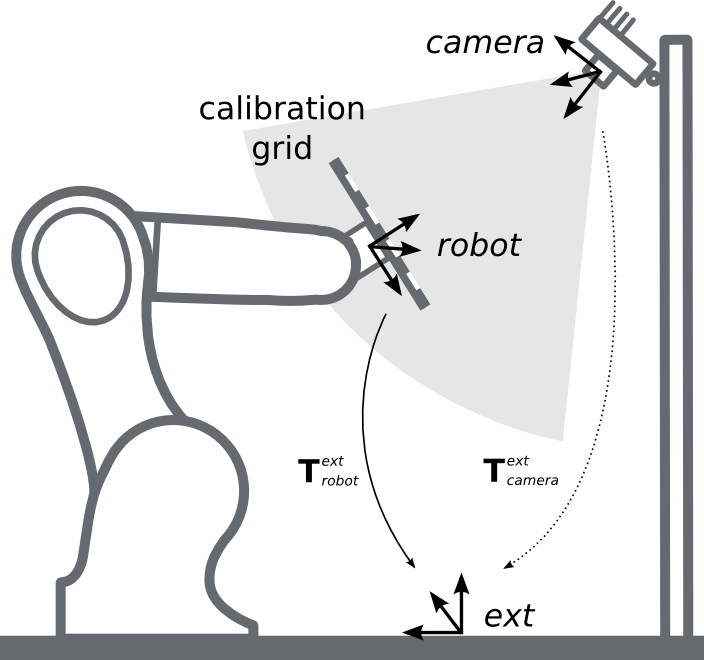
And I guess if calibrateHandEye function can be also used for a stationery camera like the following picture.
Please give me a hint or any idea. Thanks in advance.