Problem with Harris corner detection on thinned image

A new problem in my software arises :)
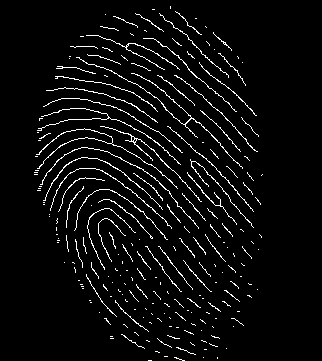
I got this input image, a skeletonized fingerprint
Then I am running Harris corner detection like in this example with the following code
cornerHarris(input_thinned, harris_corners, 2, 3, 0.04, BORDER_DEFAULT);
normalize(harris_corners, harris_corners_normalised, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(harris_corners_normalised, harris_corners_normalised);
And then I select all keypoint higher than 125 by this
int threshold = 125;
vector<KeyPoint> keypoints;
// Make a color clone for visualisation purposes
Mat harris_clone = harris_corners_normalised.clone();
harris_clone.convertTo(harris_clone, CV_8UC1);
cvtColor(harris_clone, harris_clone, CV_GRAY2BGR);
for(int i=0; i<harris_corners_normalised.rows; i++){
for(int j=0; j<harris_corners_normalised.cols; j++){
if ( (int)harris_corners_normalised.at<float>(j, i) > threshold ){
// Draw or store the keypoint location here, just like you decide. In our case we will store the location of the keypoint
circle(harris_clone, Point(i, j), 5, Scalar(0,255,0), 1);
circle(harris_clone, Point(i, j), 1, Scalar(0,0,255), 1);
keypoints.push_back( KeyPoint (i, j, 1) );
}
}
}
imshow("temp", harris_clone); waitKey(0);
And this is the result
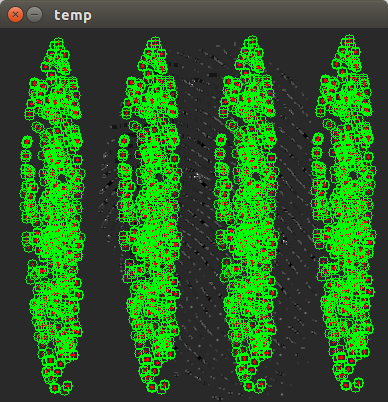
It seems to me that somewhere along the track, I got the point but they seem to be multiplied 4 times ... anyone got a clue what is going wrong?
your i's and j's are all the wrong way ;)
but the main prob seems to be this:
it basically converts to CV_8U, so the at<float>() later goes wrong. (just erase that line, you don't even need it. the demo used that to make a drawable img for viz.)
Hmm strange, found what was causing it ... if i replace
by
Then i get the exact same result.
And actually if I remove the abs conversion than it crashes ...
Hmm let me reconsider my answer :D I got it to work and now it completely gone again ... let me try to follow your guidelines and get back to you.