Apply getPerspectiveTransform and warpPerspective for bird-eye view (Python).
Hi, I'm following some tutorials to change an image of a golf green with balls to bird-eye view to measure distances in a later step.
Now when I apply the transformation to an image with some text on paper it seems to work, but when applied to the outdoor image the results are not as expected.
Here an example with the outdoor image coords and dimensions:
# targeted rectangle on original image which needs to be transformed
tl = [689, 892]
tr = [2518, 892]
br = [2518, 2071]
bl = [689, 2071]
corner_points_array = np.float32([tl,tr,br,bl])
# original image dimensions
width = 4128
height = 2322
# Create an array with the parameters (the dimensions) required to build the matrix
imgTl = [0,0]
imgTr = [width,0]
imgBr = [width,height]
imgBl = [0,height]
img_params = np.float32([imgTl,imgTr,imgBr,imgBl])
# Compute and return the transformation matrix
matrix = cv2.getPerspectiveTransform(corner_points_array,img_params)
img_transformed = cv2.warpPerspective(image,matrix,(width,height))
And here are my results for the golf image:
input

output

As you can see I don't get a nice bird-eye view.
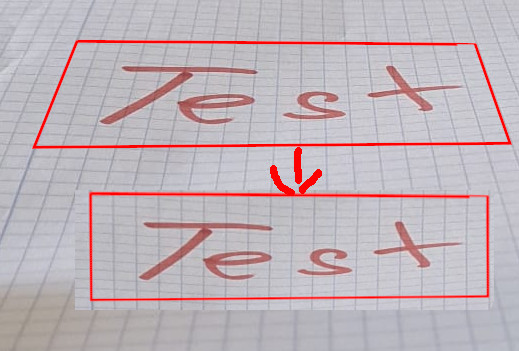
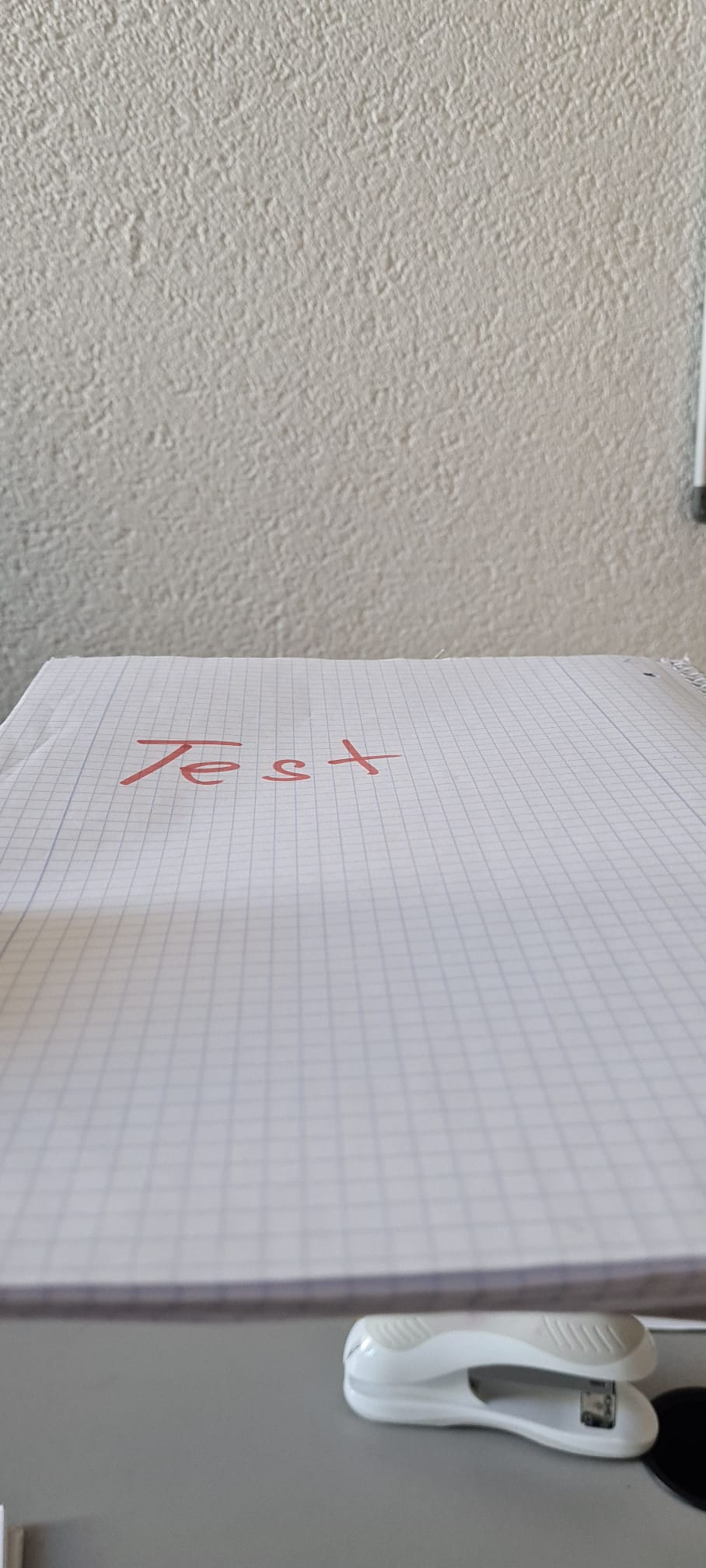
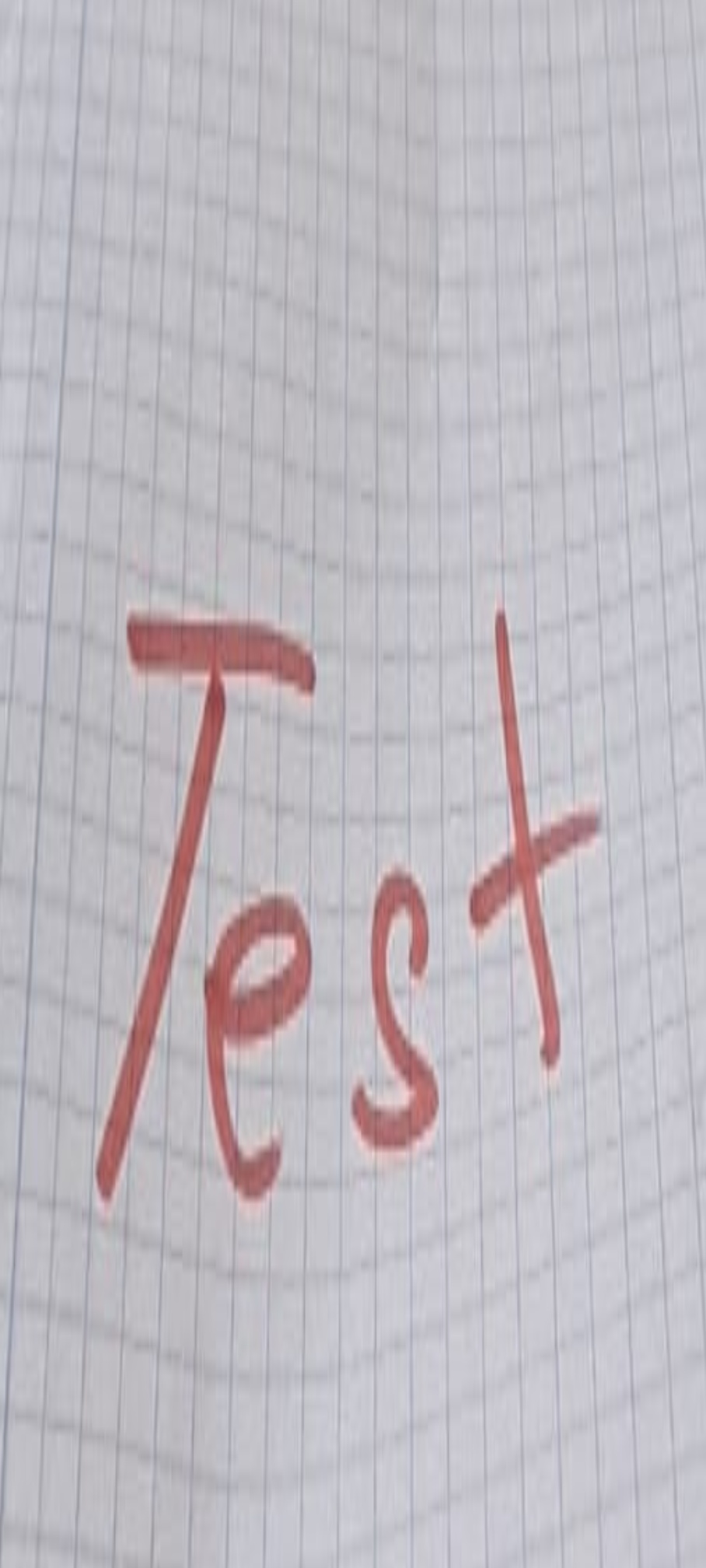
This is the result I get with text and paper using the same script just with different coords and dimensions:
Input
output
So what am I doing wrong with the first golf example? Any help would be greatly appreciated.
add a comment