Problems ChAruCo Camera Calibration
Hi together,
I have problems calibration my camere with the following code: (see attached used code) https://mecaruco.readthedocs.io/en/la...
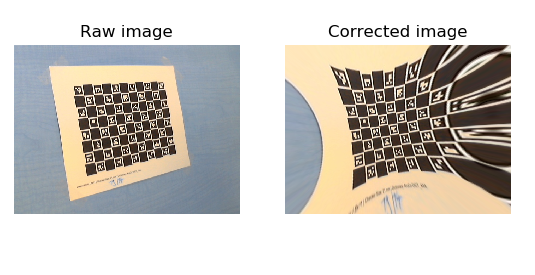
I took 60 pictures from different angles from an ChAruCo-Board (19mm Checker, 14mm AruCo) I'm getting a bad result like this:
Can anyone help, I can not find the failure.
Thanks Flo
Looks like your calibration images might be corrupted, however I have never seen errors this big. Are you sure you made good calibration images? Different angles, different distances, covering the entire image with consecutive chessboards, no blur, and not taking pictures too close to the camera with active autofocus)
HI Witek, thanks for the answer.
I took the pictures with a Logitech C270 Webcam. All pictures are taken in distance like you can see in Raw image, but from different angels all around. The Chessboard is A4 printet in high resolution on thick paper taped to the table.
I will try to take pictures from different distances as well. But could It be the cammera it self as well?
I used the Matlab Camera Calibration app to compare the results and had same bad results.
Any other ideas, I doent think its the code.
Greetings Florian
Strange. Perhaps the chessboard was mainly in the center of the calibration images? Can you share the calibration images?
Yes the chessboard is mainly in the center, is this wrong? Here is the dropboxlink to se 22 samples of the 60 pictures:
https://www.dropbox.com/sh/ih2om3guc3...
I can send you all pictures if needet as well.
In the example code they used 6x6 AruCo-Markers for the calibration and I used a 4x4 but changed in the code the marker_dict. Normaly i think it should work but I try now to use 6x6 markes as wll to be sure.
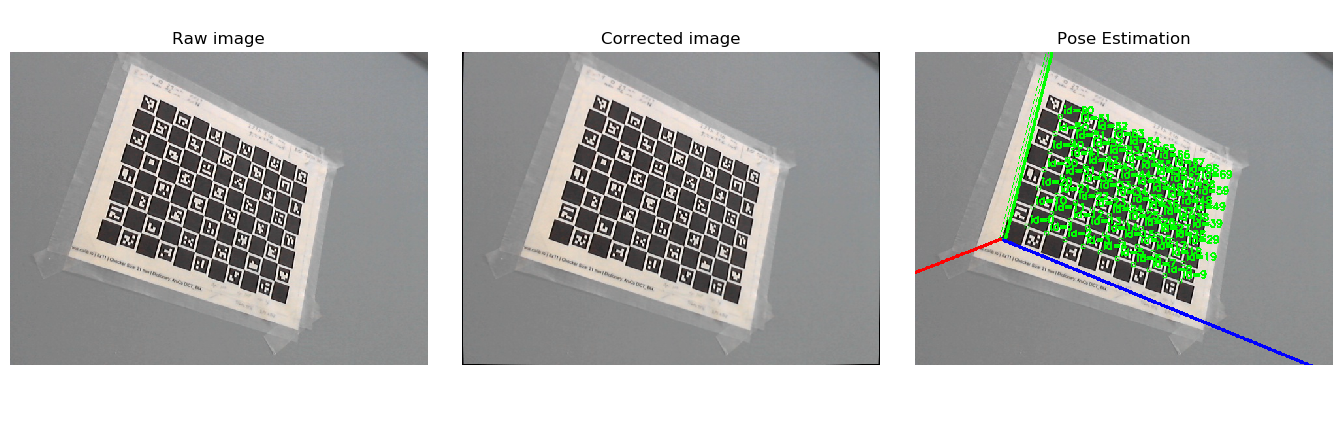
I wanted to give it a quick try, but Matlab's cameraCalibrator failed to detect the checkerboard correctly (due to aruco markers). The checkerboard should be all over the image and especially in the corners, where biggest distortions normally occur. Was your checkerboard correctly detected by OpenCV during calibration?
I tryed matlab and Python Calibration again with only Chessboard and it works pretty good.
OK good hint! I added this code to the loop when it detects the markers
found, corners = cv2.findChessboardCorners(frame, (8, 11))
Somehow it detects the AruCo-Markers but not the chessboard-corners on the ChAruCo-Board. found = non and corners= empty
I added the complete calibration code to the Dropbox folder if you want to have a look at it as well
It detects the markers and ids verry well so I´m not sure if it has to detect the checherboard.