Disparity value difference in Stereo SGBM vs. WLS disparity maps
Hello everyone,
I have been working on a stereo imaging project for a few months now. The goal is to track a defined object, compute its position (by using triangulation with stereo camera) and its orientation (by using an IMU). I get really good results, but there is something I don't understand and it's bothering me, so I come here to seek your help !
On the below image, you can see (bottom left) the left image of the stereo rig with the defined tracked object, it's position and orientation. On the top left you can see the disparity map obtained with the stereo SGBM algorithm. on the right, you can see the result obtained with the weighted least square filter (WLS).
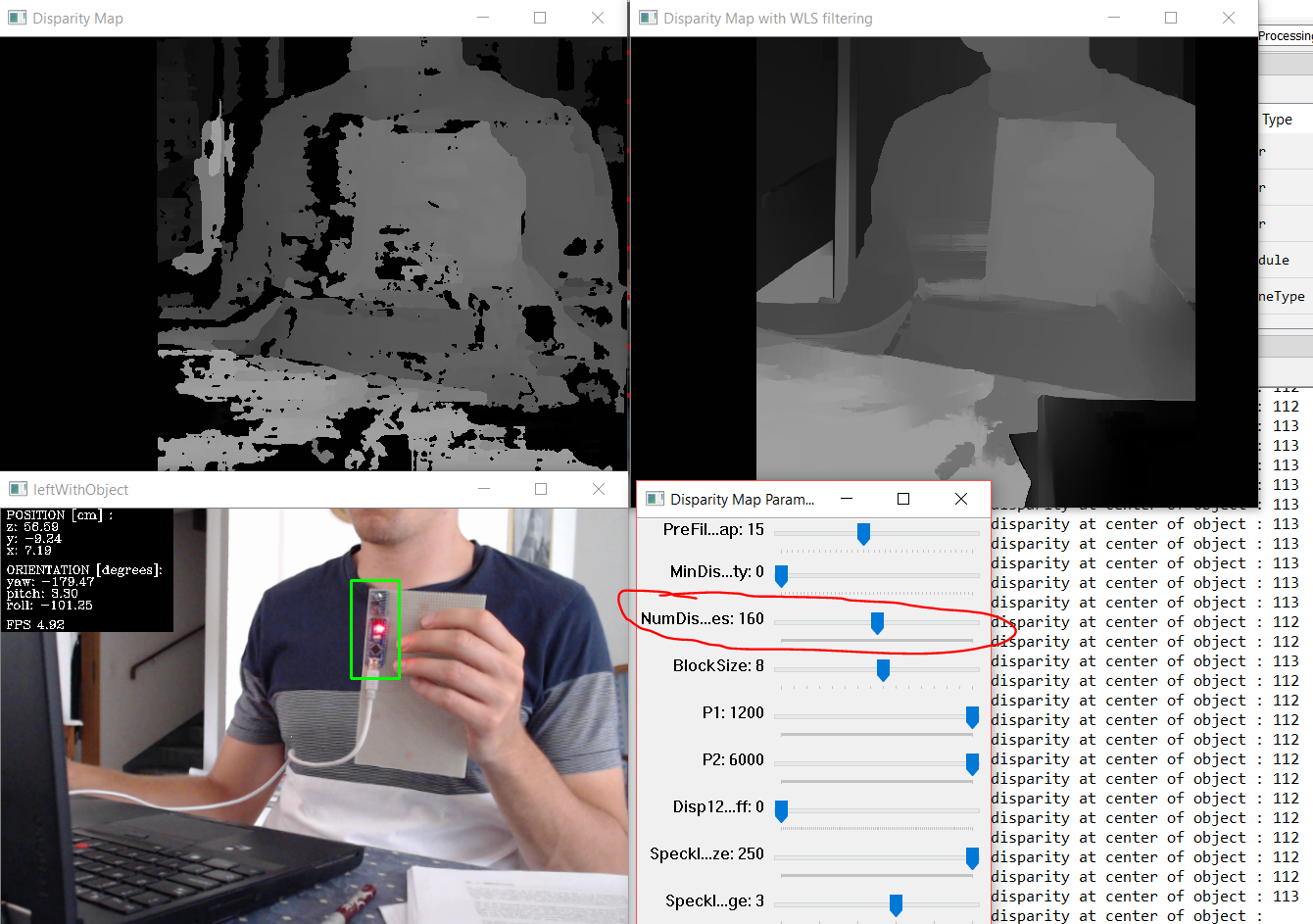
The maximum disparity (or minimum depth) I can obtain in the SGBM disparity map is equal to the "Num disparities" parameter, which represent the number of pixel over which the correspondance search is carried between the left and right views. Also, as I understood it, the WLS filtering is a way of filtering whitout obtaining "blurred" edges, which seems to work well.
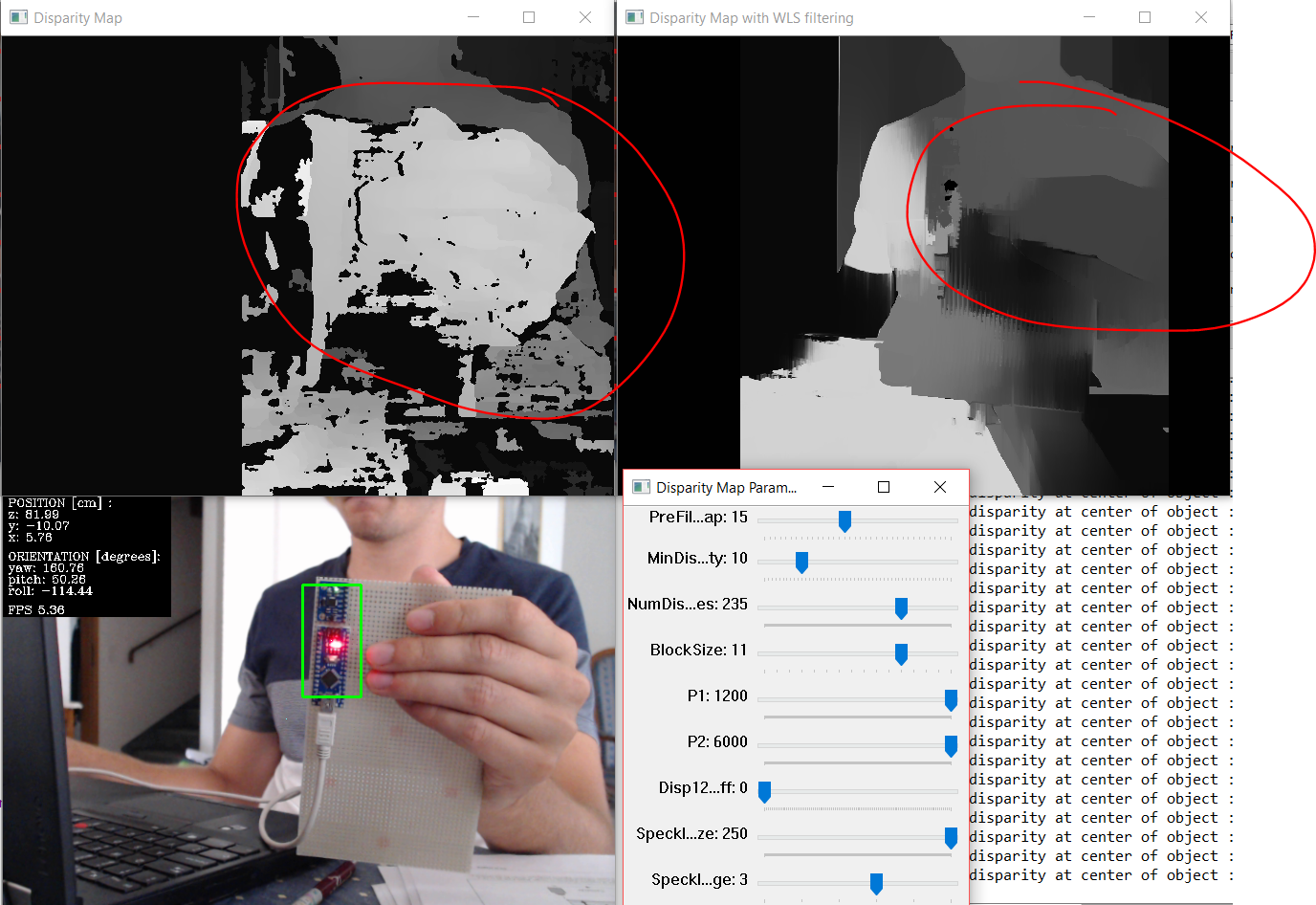
So here is what I don't understand : as you can see in the below image, the minimum depth I can obtain is not the same in the disparity map obtained with SGBM and WLS. the WLS seems to limit the depth and I get completely faulse results when I get too close ...Why is that ? What influences this in the WLS filtering process ?
I know this a very specific subject but I really hope I can find someone to help me !
Thank you.