How to make the disparity map filter not adapting?
Hello!
I am using WLS filter for beautify and stabilize disparity map. I followed this tutorial - created right and left matchers and compute two disparity maps. My WLS filter parameters are: lambda = 8000, sigma = 1.5; SGBM parameters are win_size = 9, min_disp = 0, num_disp = 80, uniquenessRatio = 0, speckleRange = 2, speckleWindowSize = 150, disp12MaxDiff = 10, preFilterCap = 3. SGBM parameters i got by hands using trackbars, WLS parameters i teked from tutorial.
After applying filter i got nice result:
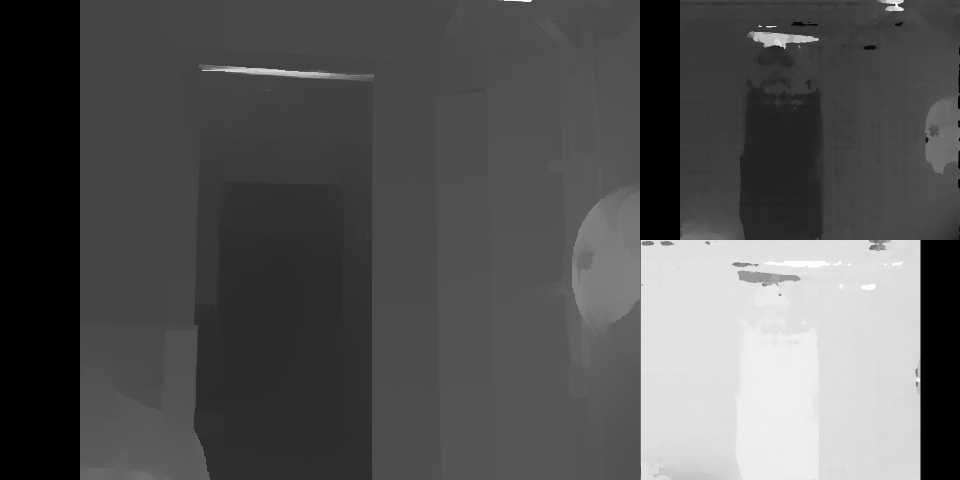
biggest - filtered, upper - left, lower - right.
But when i show my hand all disparity map stays darker:
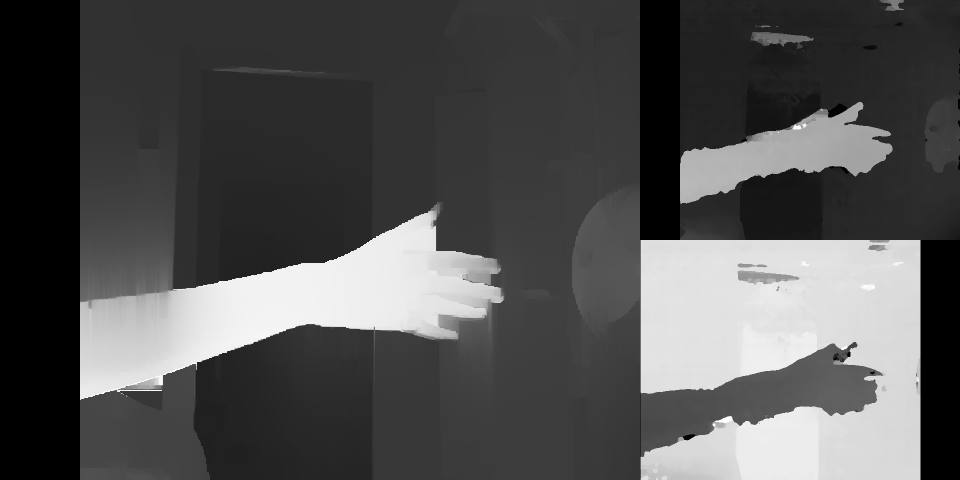
My question is how to make disparity map stable and not "adapting" to environment? Maybe i must change the parameters or do something else, or it is cameras problem?
Thank you!
You may want to compare output at each step in the chain - capture of initial images, result of disparity, result of WLS filter - to find out where it is getting in.
Make sure to compare the numbers in the disparity arrays, rather than the visual perceptual appearance of the data in the image viewers. Build histograms, look at numbers. Image renderings are more qualitative than quantitative - it may be something in the display stream is trying to normalize the histogram in some way. Said another way - drive it down to a numbers comparison, rather than a visual perceptual impression, to understand where in the process the problem is occurring.