Stereo Matching/Calibration Help
Hello,
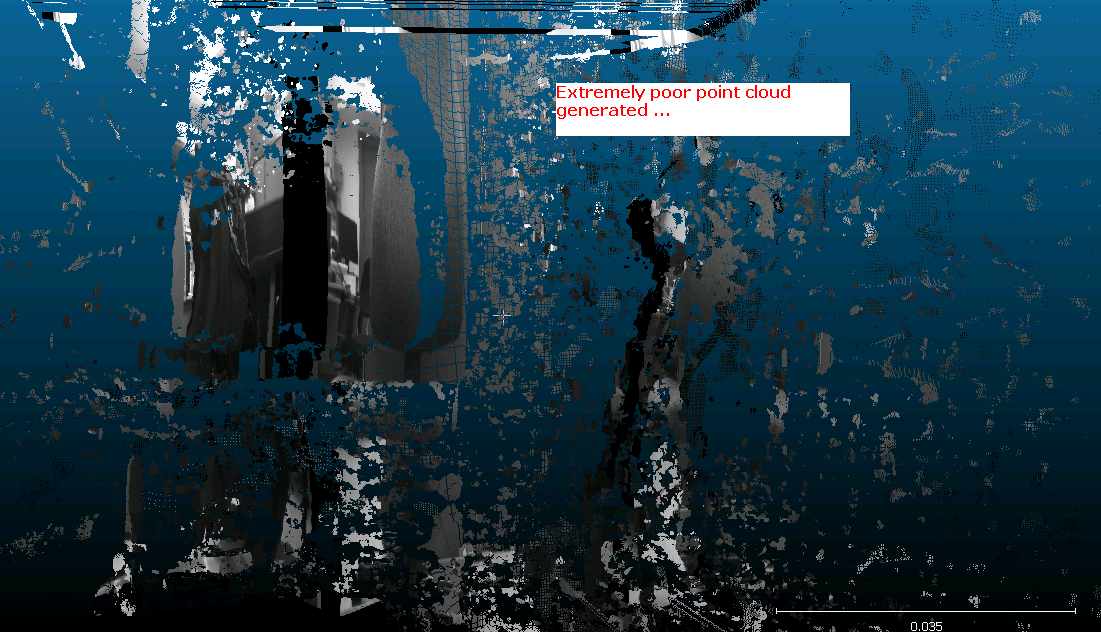
I am using the Bumblebee XB3 Stereo Camera and it has 3 lenses. I've spent about three weeks reading forums, tutorials, the Learning OpenCV book and the actual OpenCV documentation on using the stereo calibration and stereo matching functionality. In summary, my issue is that I have a good disparity map generated but very poor point-clouds, that seem skewed/squished and are not representative of the actual scene.
What I have done so far:
Used the OpenCV stereo_calibration and stereo_matching examples to:
1) Calibrate my stereo camera using chess board images
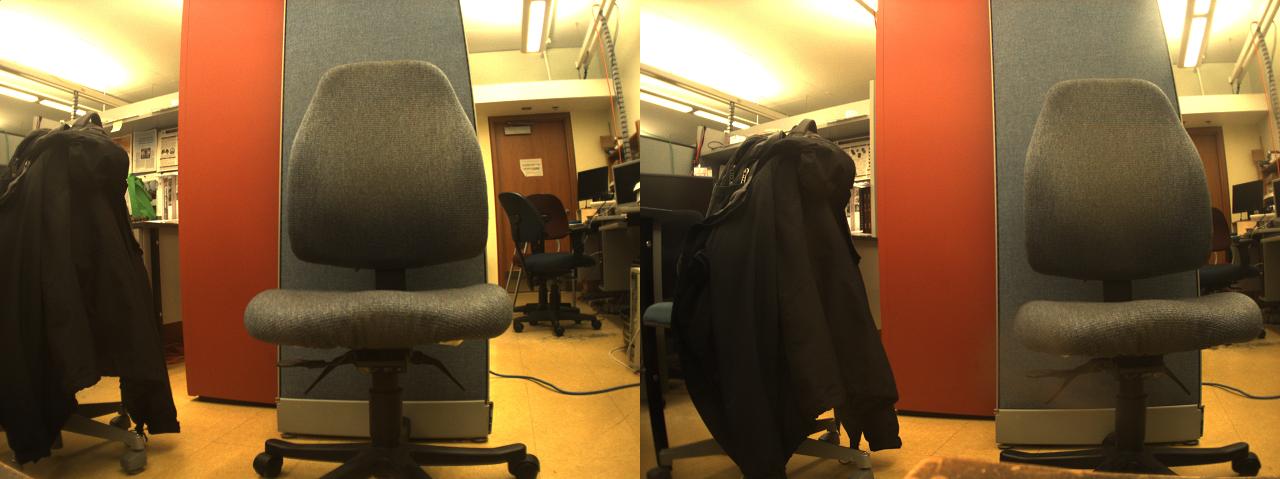
Raw Scene Images:
2) Rectified the raw images obtained from the camera using the matrices after camera calibration

3) Generated a disparity image from the rectified images using Stereo Matching (SGBM)

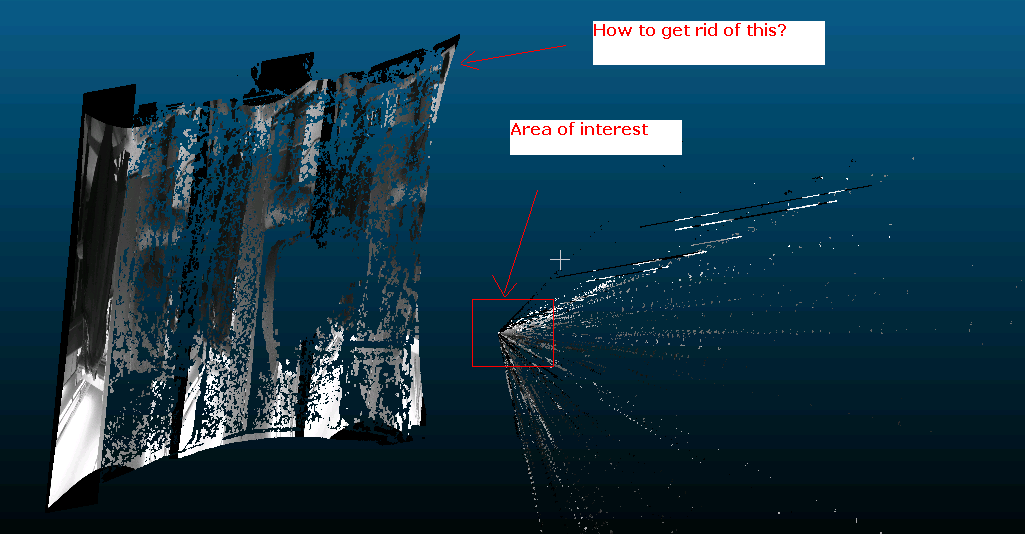
4) Projected these disparities to a 3D Point Cloud
and
What I have done so far as elimination towards my problem:
- I have tried the 1st and 2nd images, then the 2nd and 3rd lenses and finally the 1st and 2nd.
- I've re-run calibration of my chess-board captures by varying the distance (closer/farther away)
- I have used over 20 stereo pairs for the calibration
- Varying Chessboard size used: I have used a 9x6 Chessboard image for calibration and now switched to using a 8x5 one instead
- I've tried using the Block Matching as well as SGBM variants and get
relatively similar results. Getting
better results with SGBM so far. - I've varied the disparity ranges, changed the SAD Window size etc. with
little improvement
What I suspect the problem is:
My disparity image looks relatively acceptable, but the next step is to go to 3D Point cloud using the Q matrix. I suspect, I am not calibrating the cameras correctly to generate the right Q matrix. Unfortunately, I've hit the wall in terms of thinking what else I can do to get a better Q matrix. Can someone please suggest ways ahead?
The other thing that I think might be problematic is the assumptions I am making when using the cv::stereoCalibrate function. For the moment, I individually calibrate each camera to get the camera and distortion (cameraMatrix[0], distCoeffs[0] and cameraMatrix[1], distCoeffs[1]) matrices so it makes the complexity for the stereoCalibrate function a little easier.
stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, E, F,
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5),
//CV_CALIB_FIX_ASPECT_RATIO +
//CV_CALIB_ZERO_TANGENT_DIST +
//CV_CALIB_SAME_FOCAL_LENGTH +
CV_CALIB_RATIONAL_MODEL
//CV_CALIB_FIX_K3 + CV_CALIB_FIX_K4 + CV_CALIB_FIX_K5
);
Additionally, I think it might be useful to mention how I am going from disparity to point cloud. I am using OpenCV's cv::reprojectImageTo3D and then writing the data to a PCL Point cloud structure. Here is the relevant code:
cv::reprojectImageTo3D( imgDisparity16S, reconstructed3D, Q, false, CV_32F);
for (int i = 0; i < reconstructed3D.rows; i++)
{
for (int j = 0; j < reconstructed3D.cols; j++)
{
cv::Point3f cvPoint = reconstructed3D.at<cv::Point3f>(i, j);
//Filling in a PCL structure
pcl::PointXYZRGB point;
point.x = cvPoint.x;
point.y = cvPoint.y;
point.z = cvPoint ...
Have you found something ? Because I'm having the same issue right now. I'm trying to get a better disparity map too, but it really difficult.
I'm interested in this answer as well. I'm trying to compare OpenCV stereo processing to what I get using the Point Grey (PG) libraries. I am trying to use images rectified by the PG software, and then generate the Q matrix using stereoRectify and parameters that I get from the PG calibration data. The resulting point cloud is curved improperly, and fails to generate point clouds at a distance. Are there any guidelines for comparing OpenCV and PG results?
I met this problem, too. Have you figure it out? Would you mind if you could share some new progress of it? thanks a lot!
We are also met the same problem -- Can any one solved this recently
same here......exact same problem...has anyone solved this? This is so frustrating =(
maybe @Eduardo could share his remarks
@sturkmen
Sorry, I don't have much experience on stereo matching topic.
My advices would be to:
stereobmparameters to have a better disparity result (the quality of the depth map can vary drastically with wrong parameters, see for instance)You can also try to remove outliers for points having non coherent depth.