stereo rectify incorrect result
Hi i am new to computer vision and also to opencv.
I am trying to rectify a stereo images with the following workflow:
- Calibrate left and right camera with "calibrateCamera" on both images.
- "stereoCalibrate" using the camera matrix and distortion coeff found in the previous step as the input (fix intrinsic flag)
- "stereoRectify" using the camera matrix, distortion coeff, rotation- and translation-matrix from the previous step.
- "initUndistortRectifyMap" using the output from previous steps
- "remap" using the output from previous step
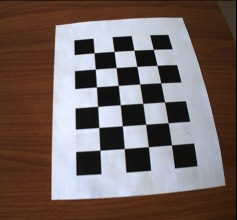
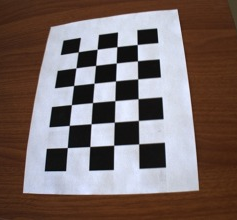
After remap I got a weird result, the images are not rectified at all. These are the images I used:
{kind=link}
{kind=link}
These are the result:
{kind=link}
{kind=link}
I think I made a basic mistake but I don't know what. Could anyone clarify me?
Thank you in advance!
add a comment