Location of Epipole

Hi,
I was checking on epipolar geometry, trying to draw the epipolar lines. From reading, what i understood is that epipole of image 1 is the projection of camera center-2 if both images were taken together. And all the epilines pass through these epipole.
I attached two images,
in epi1.jpg, I drew epilines in left image for the corresponding points in the right image. Intersection of epilines shows the projection of camera of right image which seems to be correct in this case.
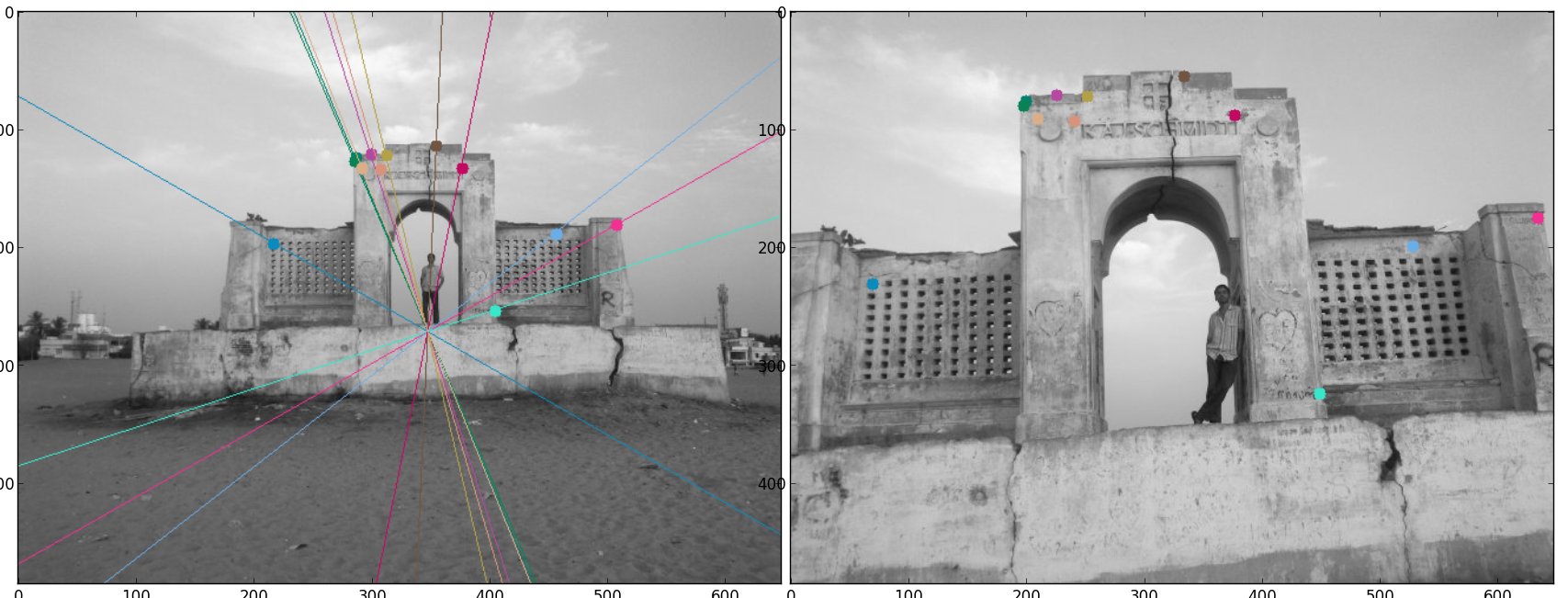
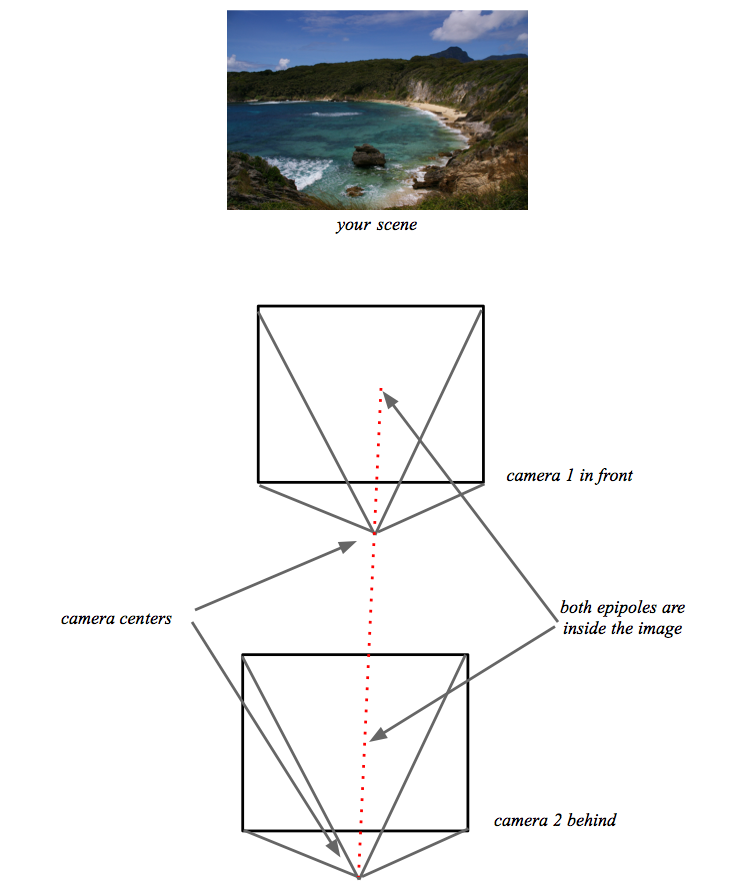
But in second image, I expected epipole to be outside the image since camera projection of right image can't be inside the left image since camera in left image is in front of camera of right image. But I got epipole to be inside. How is it possible?

(Sorry if i confused you)
This is my code: https://gist.github.com/abidrahmank/6121536
Regards Abid K.
Hello. I can't run the example in https://opencv-python-tutroals.readth... an also your example from github. I'm using OpenCV 2.4.1.0. The first error I get is: OpenCV Error: Unsupported format or combination of formats (Both matrices must be floating-point (single or double precision)) in cvConvertPointsHomogeneous, file ........\opencv\modules\calib3d\src\fundam.cpp, line 901 Traceback (most recent call last): File "epipolar.py", line 54, in
F, mask = cv2.findFundamentalMat(pts1,pts2,cv2.FM_RANSAC)
cv2.error: ........\opencv\modules\calib3d\src\fundam.cpp:901: error: (-210) Both matrices must be floating-point (single or double precision) in function cvConvertPoin
I have the same issue. Did you find a solution?
AttributeError: 'module' object has no attribute 'SIFT' i have python(x,y) version 2.7 et opencv version3.0.0 why I have this error message?
try this: sift = cv2.xfeatures2d.SIFT_create()