This forum is disabled, please visit https://forum.opencv.org
| 2020-10-04 08:29:50 -0600 | received badge | ● Good Question (source) |
| 2019-09-05 09:49:56 -0600 | received badge | ● Notable Question (source) |
| 2018-01-01 01:05:11 -0600 | received badge | ● Nice Question (source) |
| 2017-08-01 13:57:33 -0600 | received badge | ● Popular Question (source) |
| 2017-02-06 08:48:07 -0600 | received badge | ● Notable Question (source) |
| 2016-10-23 10:54:41 -0600 | received badge | ● Famous Question (source) |
| 2015-07-08 05:42:00 -0600 | received badge | ● Popular Question (source) |
| 2015-03-18 18:51:33 -0600 | received badge | ● Nice Question (source) |
| 2015-02-25 08:20:40 -0600 | received badge | ● Notable Question (source) |
| 2014-12-03 09:36:33 -0600 | received badge | ● Famous Question (source) |
| 2014-09-02 16:45:41 -0600 | received badge | ● Famous Question (source) |
| 2014-07-20 21:38:48 -0600 | received badge | ● Popular Question (source) |
| 2014-01-13 15:07:02 -0600 | received badge | ● Good Question (source) |
| 2013-12-11 08:38:09 -0600 | received badge | ● Notable Question (source) |
| 2013-11-18 15:31:25 -0600 | received badge | ● Notable Question (source) |
| 2013-09-16 02:36:39 -0600 | received badge | ● Famous Question (source) |
| 2013-07-01 15:34:42 -0600 | received badge | ● Popular Question (source) |
| 2013-06-04 23:35:58 -0600 | received badge | ● Popular Question (source) |
| 2013-03-15 08:06:37 -0600 | received badge | ● Notable Question (source) |
| 2013-01-11 02:49:40 -0600 | received badge | ● Popular Question (source) |
| 2012-10-18 06:03:41 -0600 | asked a question | problem with Orb matching Hi to all! i try to use Orb feature for object detection... i use this code: but i have this error:
I don't understand where is the error.... thanks!! |
| 2012-10-08 13:55:13 -0600 | asked a question | warpperspective with iplimage hi! there are a method for usig warpperspective with the iplimage? i try : warpPerspective(img_frame,crop,Homo.inv(DECOMP_LU),cvGetSize(img_temp)); where img_frame and crop are Iplimage* but i give me an error error: invalid initialization of reference of type 'const cv::_InputArray&' from expression of type 'IplImage*' /opt/local/include/opencv2/imgproc/imgproc.hpp:540: error: in passing argument 1 of 'void cv::warpPerspective(const cv::_InputArray&, const cv::_OutputArray&, const cv::_InputArray&, cv::Size, int, int, const cv::Scalar&)' |
| 2012-10-08 11:40:43 -0600 | commented answer | convert mat to iplimage yes...i tried this method but don't work... |
| 2012-10-08 11:37:36 -0600 | commented question | convert mat to iplimage I try to use VideoWriter::write... I create VideoWriter writer2("video_rect_out2.avi", CV_FOURCC('M','J','P','G'), fps, cvSize(img_template.cols, img_template.rows), true); and after i use writer2 << img_template; but at the end the video result is empty... |
| 2012-10-08 11:09:20 -0600 | answered a question | convert mat to iplimage mmmm when i use this iplimage for the stream of the video tha video don't contain any image... |
| 2012-10-08 09:57:00 -0600 | asked a question | convert mat to iplimage hi to all! i have a simple question...can i convert a Mat imege into a Iplimage* ??? i need to insert the Mat image into a video,and the cvWriteFrema need a IplImage... thanks :) |
| 2012-10-08 02:51:33 -0600 | asked a question | Problem in create a video output Hi to all! I have a problem with the creation of a output video. In my program I take a video from the input and I recognize if there is some specific object (in this case the screen of a smartphone) and then I create the rectified image of the frame, so I have a new image with the video of the smartphone... I must create the video with the image of the rectification of the screen of the smartphone... But at the end I have only a videofile of 8Kb... I think that the writer doesn't insert the image in the stream.... this is the definition of the writer: and this is the insert of the image in the stream (img_video_stream is the image of the rectification of the screen): someone can have some idea of the problem? |
| 2012-08-31 07:57:41 -0600 | received badge | ● Nice Question (source) |
| 2012-08-30 03:48:19 -0600 | answered a question | homography for cordinates of poins i already try i write: perspectiveTransform(keypoints[i],temp,inv) but he give me an error : invalid initialization of reference of type 'const cv::_InputArray&' from expression of type 'cv::KeyPoint' |
| 2012-08-28 10:04:42 -0600 | asked a question | homography for cordinates of poins is it possible to apply a homography to the coordinates of a point? for example in his code: i want apply the homography "inv" to "x" and "y".... |
| 2012-08-09 08:31:14 -0600 | answered a question | apply homography to image thanks! can you give me an example of the use of warpPerspective()? i try warpPerspective(img_source,img_dest,H,img_dest.size) but i give me an error main.cpp:211: error: conversion from 'cv::Mat::MSize' to non-scalar type 'cv::Size' requested |
| 2012-08-09 05:55:35 -0600 | asked a question | apply homography to image hi to all! i have a little problem...if i have a homography H and an image (call it img_source)....how can i apply this homography to the image? i try: perspectiveTransform( img_source, img, H); but when i run the program i give me an error.... thank a lot! |
| 2012-08-02 12:13:47 -0600 | asked a question | good result or bad result for findHomography I read that for finding that the homography is good or bad thare are 2 solution:
Is this true? and there is a method to calculate the SVD in opencv? |
| 2012-08-01 08:27:12 -0600 | answered a question | object detection using SURF & FLANN thanks! i try to do some debug in my code and i have verify that the Homography H is wrong for some frames! the exact H is : H = [0.6487030067242824, -0.08631426465278198, 261.6879493611227; 0.01335918943588019, 0.7381261562725441, 68.20078368844314; -0.0001412237402441972, -5.520086932186027e-06, 1] and for some frames there is: H = [-2.57857982218806, 0.3892895299010169, 394.0872195148755; -0.7676881270794974, 0.2898285736196523, 107.9234724910376; -0.006545151477964493, 0.0009948206740805412, 1] now i tries with your method but i am not sure that i can change the SURF with the ORB....in this case some one know a method for correct the wrong Homography?????? thanks a lot!!! |
| 2012-08-01 05:37:46 -0600 | received badge | ● Student (source) |
| 2012-07-31 14:44:35 -0600 | commented answer | crop image sorry have another question... but if i want to crop a region that is not a rect? for example i have 4 point (the vertices) and i want the region delimited by this vertices (almost of the time is a rectangle but not always) |
| 2012-07-31 14:40:04 -0600 | commented answer | crop image thanks :) |
| 2012-07-31 14:18:13 -0600 | asked a question | crop image hi! someone know how to use crop for the image? for example i have one image i want to show a part of this image... i read that there are the cvRect and cvSetImageROI..... thanks a lot :) |
| 2012-07-31 09:55:20 -0600 | received badge | ● Editor (source) |
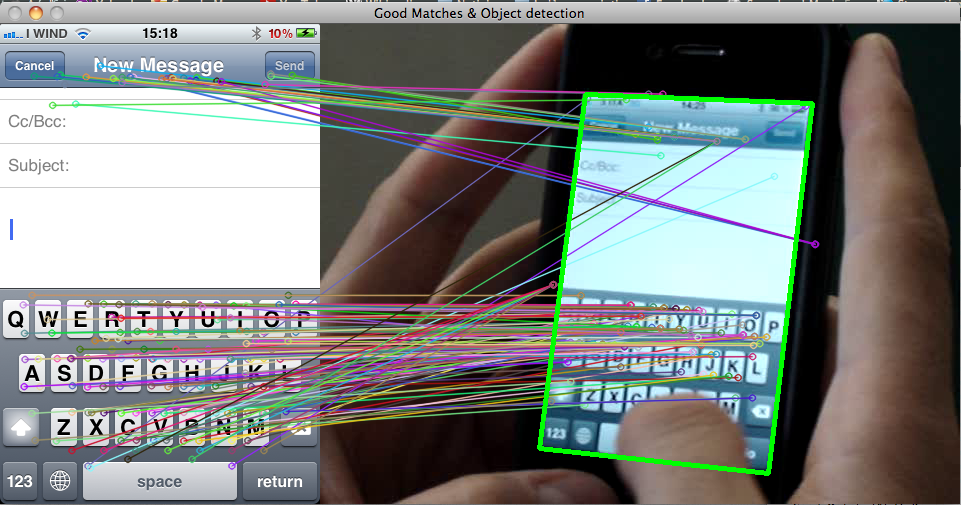
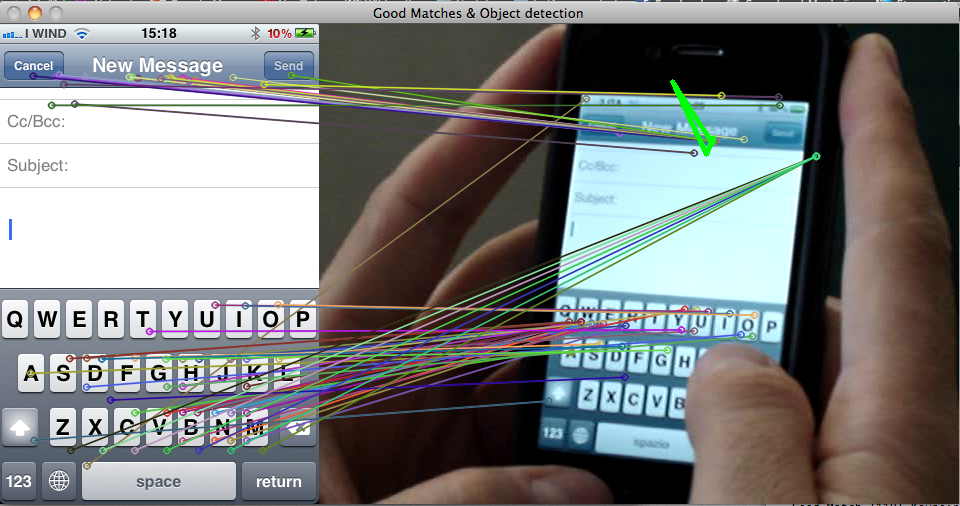
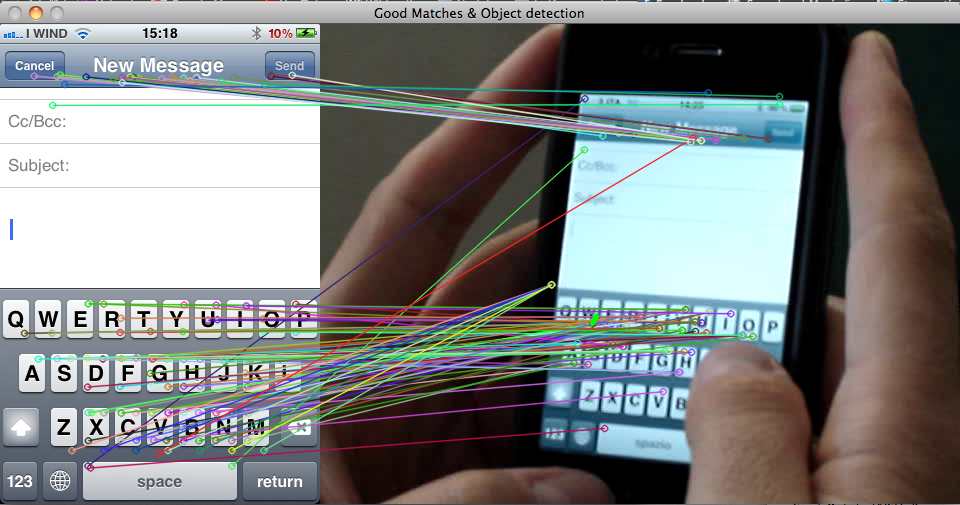
| 2012-07-31 09:55:20 -0600 | edited question | object detection using SURF & FLANN hi! i write one program for finding one object in a image file in a video . i read the istruction in the opencv manual and i use the SURF and the FLANN matcher. the program draw lines between the corners in the mapped object in the video file. the problem is that in some frame the lines are not present or lines draw a strange figure. for example...this is the correct output
and this is the wrong result for some frame
this is the code for the program: void surf_detection(Mat img_1,Mat img_2); /** @function main */ |