object detection using SURF & FLANN
hi!
i write one program for finding one object in a image file in a video . i read the istruction in the opencv manual and i use the SURF and the FLANN matcher. the program draw lines between the corners in the mapped object in the video file. the problem is that in some frame the lines are not present or lines draw a strange figure.
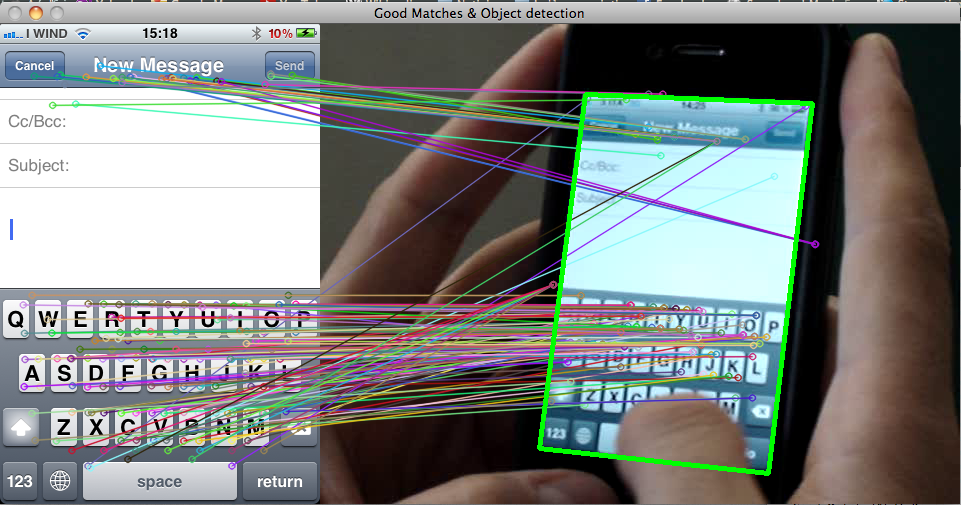
for example...this is the correct output
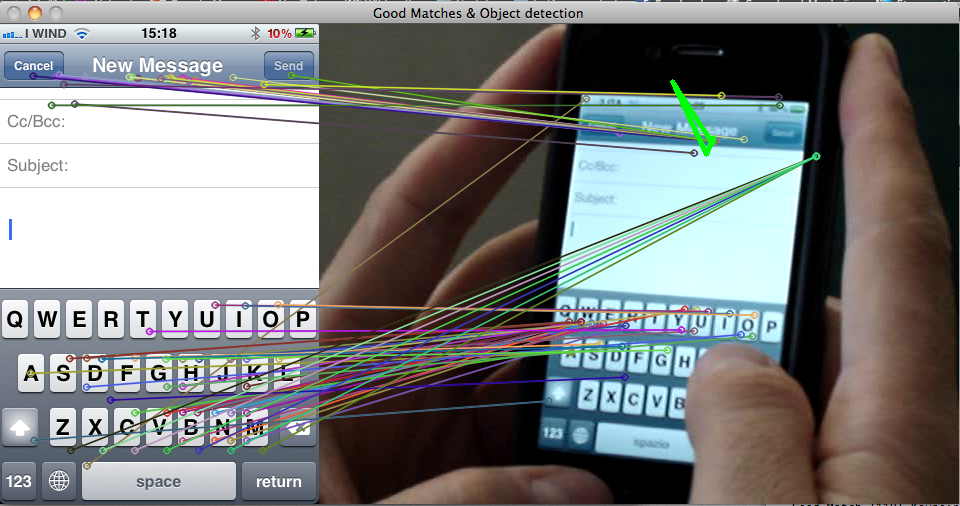
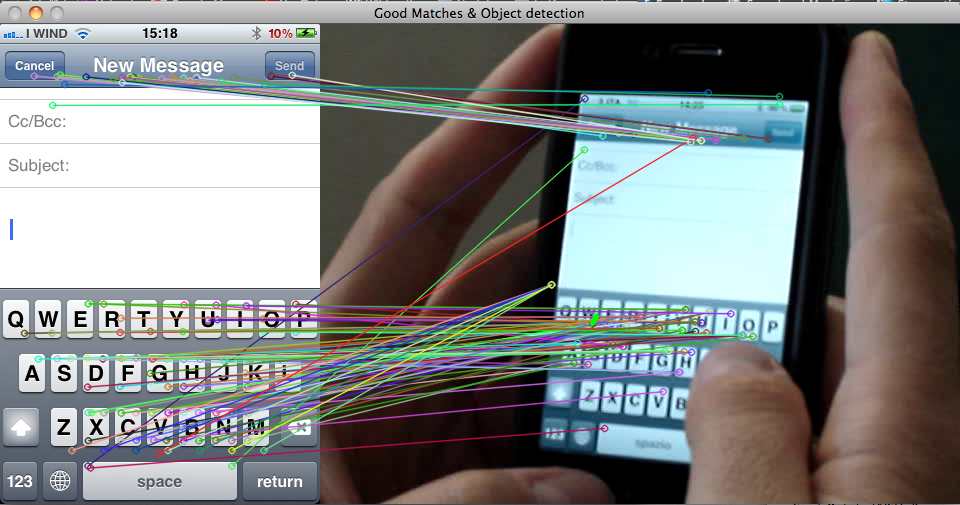
and this is the wrong result for some frame
this is the code for the program:
void surf_detection(Mat img_1,Mat img_2); /** @function main */
int main( int argc, char** argv )
{
int i;
int key;
CvCapture* capture = cvCaptureFromAVI("video.MPG");// Read the video file
if (!capture){
cout <<" Error in capture video file" << endl;
return -1;
}
Mat img_template = imread("template.png"); // read template image
CvVideoWriter *writer = 0;
int isColor = 1;
//Get capture device properties
cvQueryFrame(capture); // this call is necessary to get correct
// capture properties
int frameH = (int) cvGetCaptureProperty(capture, CV_CAP_PROP_FRAME_HEIGHT);
int frameW = (int) cvGetCaptureProperty(capture, CV_CAP_PROP_FRAME_WIDTH);
int fps = (int) cvGetCaptureProperty(capture, CV_CAP_PROP_FPS);
int numFrames = (int) cvGetCaptureProperty(capture, CV_CAP_PROP_FRAME_COUNT);
writer=cvCreateVideoWriter("out.avi",CV_FOURCC('P','I','M','1'),
fps,cvSize(frameW,frameH),isColor);
IplImage* img = 0;
for(i=0;i<numFrames;i++){
cvGrabFrame(capture); // capture a frame
img=cvRetrieveFrame(capture); // retrieve the captured frame
printf("Frame n° %d \n", i );
surf_detection (img_template,img);
cvWriteFrame(writer,img); // add the frame to the file
cvShowImage("mainWin", img);
key=cvWaitKey(20); // wait 20 ms
}
cvReleaseVideoWriter(&writer);
//waitKey(0); // Wait for a keystroke in the window
return 0;
}
/** @function surf_detection */
/** USE OF FUNCTION*/
/** param1: immagine del template*/
/** param2: immagine estratta dal video*/
void surf_detection(Mat img_1,Mat img_2)
{
if( !img_1.data || !img_2.data )
{
std::cout<< " --(!) Error reading images " << std::endl;
}
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_1, keypoints_2;
std::vector< DMatch > good_matches;
do{
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Draw keypoints
Mat img_keypoints_1; Mat img_keypoints_2;
drawKeypoints( img_1, keypoints_1, img_keypoints_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
drawKeypoints( img_2, keypoints_2, img_keypoints_2, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0;
double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist )
min_dist = dist;
if( dist > max_dist )
max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist )
//-- PS.- radiusMatch can also be used here.
for( int i = 0; i < descriptors_1.rows; i++ )
{
if( matches[i].distance < 2*min_dist )
{
good_matches.push_back( matches[i]);
}
}
}while(good_matches.size()<100);
//-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Localize the ...

Hi Andrea, from which university do you come from?