#include "stdafx.h"
#include <iostream>
using namespace std;
using namespace cv;
VP FindBigestContour(Mat src){
int imax = 0;
int imaxcontour = -1;
std::vector<std::vector<cv::Point>>contours;
findContours(src,contours,CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE);
for (int i=0;i<contours.size();i++){
int itmp = contourArea(contours[i]);
if (imaxcontour < itmp ){
imax = i;
imaxcontour = itmp;
}
}
return contours[imax];
}
int main(int argc, char* argv[])
{
Mat src = imread("e:/template/cloud.png");
Mat temp;
cvtColor(src,temp,COLOR_BGR2GRAY);
threshold(temp,temp,100,255,THRESH_OTSU);
imshow("src",temp);
VP VPResult = FindBigestContour(temp);
int dist = 0;
int maxdist = 0;
Point center;
for(int i=0;i<src.cols;i++)
{
for(int j=0;j<src.rows;j++)
{
dist = pointPolygonTest(VPResult,cv::Point(i,j),true);
if(dist>maxdist)
{
maxdist=dist;
center=cv::Point(i,j);
}
}
}
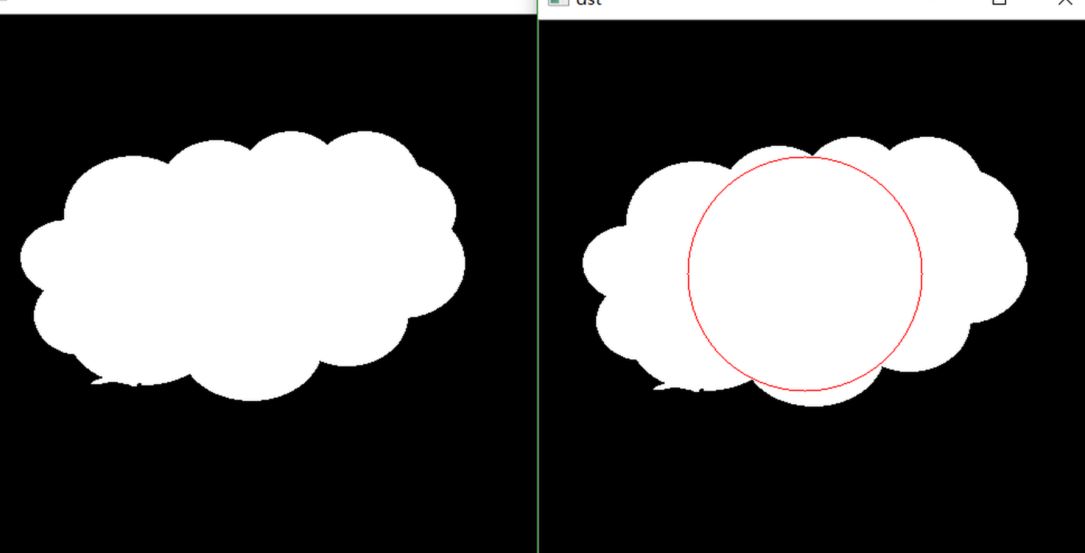
circle(src,center,maxdist,Scalar(0,0,255));
imshow("dst",src);
waitKey();
}

Are the contours convex?