This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I am not sure to understand you correctly when you said:
(which assumes the object wasn't rotated or translated at all)
to eliminate the projection, and get the world coordinates of those axes once they've been rotated and translated
Anyway, even if it does not answer your question I will try to add some useful information.
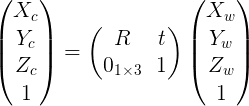
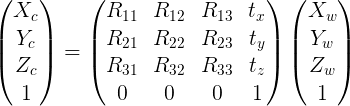
What you have is the camera pose or the transformation matrix that allows to transform a coordinate in the world frame to the corresponding coordinate in the camera frame:
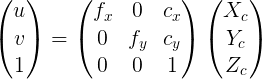
The perspective projection projects the 3D coordinates in the camera frame to the image plane according to the pinhole camera model:
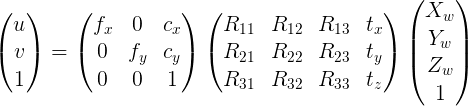
The full operation when you want to draw for example the world frame origin in the image plane should be:
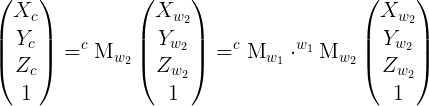
Now if you know the geometric transformation between two frames w1 and w2:

To draw the coordinate of a point in frame w2 onto the image plane, you have to first compute its coordinate in the camera frame:
This figure should illustrate the situation:
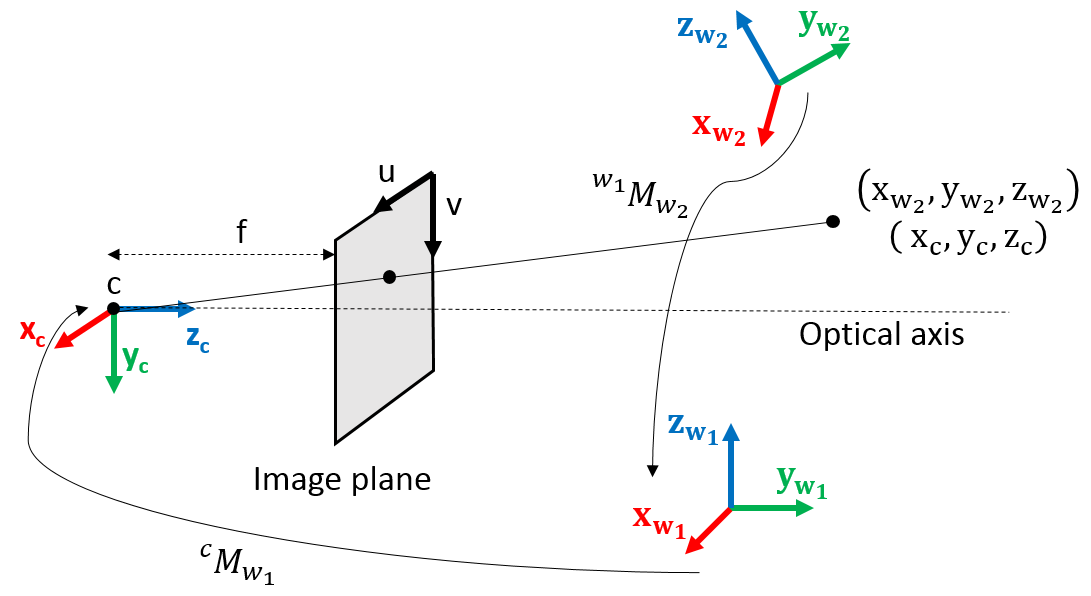
I hope that what I have written is mostly correct.
PS: you can read this answer for other details about homogeneous transformation.