This forum is disabled, please visit https://forum.opencv.org
| 2014-10-23 23:33:27 -0600 | commented question | Line Detection. Ok, i should try it again with proper structuring element. Thanks |
| 2014-10-22 09:10:08 -0600 | commented question | Line Detection. Will canny give edges of different thickness? Since if the canny output give edges of different thickness then it will be correct solution but if the detected edges are of same thickness then the morphological operations will be much hard to calibrate and I will to design a much good and sophisticated structuring element. |
| 2014-10-21 23:25:51 -0600 | commented question | Line Detection. Since all the edges are of same thickness it doesn't matter what I should use first opening or closing. I want to use the parameters in Hough P Transform to eliminate redundant lines. |
| 2014-10-21 10:47:22 -0600 | commented question | Line Detection. Actually if I will use morphological operations, the edges on which I have to work will be lost! Since they are of same thickness. |
| 2014-10-20 14:59:02 -0600 | commented question | Line Detection. ya it's good to use morphological operations but HoughP transform already have parameters to do this. Can you tell me the working and use of last 2 parameters in which i have given 600 and 300 value? |
| 2014-10-18 10:28:25 -0600 | answered a question | Line detectionin opencv C++ for hough line code is -:
this while restrict the scope of detected lines and then you will be able to show your horizontal lines only. |
| 2014-10-18 10:23:04 -0600 | received badge | ● Supporter (source) |
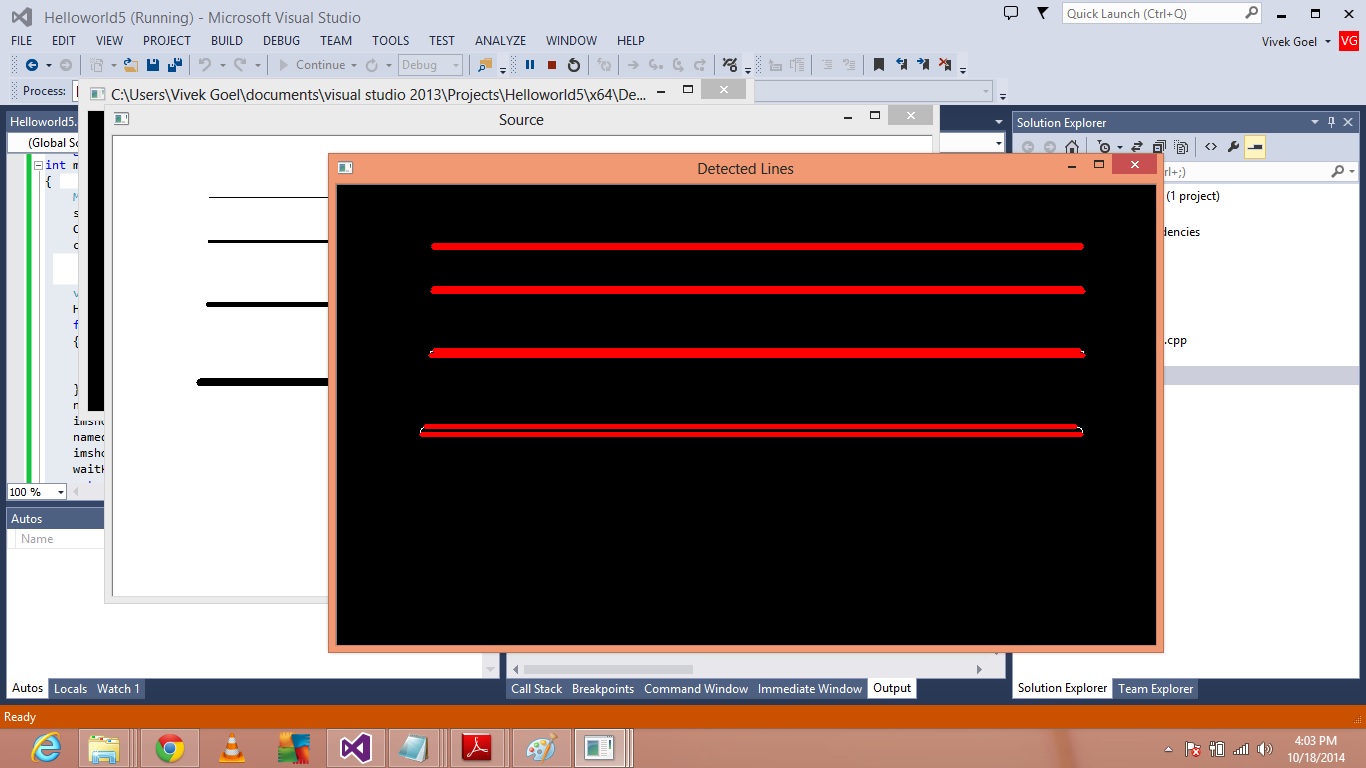
| 2014-10-18 05:36:55 -0600 | asked a question | Line Detection. After increasing the minLineLength and decreasing maxLineGap program is still showing number of lines and also the gap is also visible.
Can someone tell me the problem in the program? Image is:- |
| 2014-10-17 11:20:47 -0600 | commented question | Can someone tell me how to make line following code. I mean algorithm or functions i should use. No issue :) Hitting hard make you stronger. And yes i asked new question. My apology. |
| 2014-10-17 11:15:59 -0600 | asked a question | Line follwoing Applied hough line transform. How can I find orientation of the detected line? Firstly:-
But the program become very complex with no result. |
| 2014-10-17 11:12:27 -0600 | commented question | Can someone tell me how to make line following code. I mean algorithm or functions i should use. Did that :( |
| 2014-10-17 11:09:49 -0600 | commented question | Can someone tell me how to make line following code. I mean algorithm or functions i should use. Sorry Sir, I had read the faq and I had also tried the code of this problem but after many effort I failed, I want to start with scratch. So therefore I ask this type of question. |
| 2014-10-17 10:54:51 -0600 | commented question | Can someone tell me how to make line following code. I mean algorithm or functions i should use. There is no issue in giving command. But I am not getting the algorithm how to find orientation. |
| 2014-10-17 10:42:21 -0600 | asked a question | Can someone tell me how to make line following code. I mean algorithm or functions i should use. I mean algorithm or functions I should use. I want to make my bot work and walk using line following. |
| 2014-08-23 09:07:48 -0600 | commented question | Why we use mainly HSV color space nor BGR color space for color detection? So in shadow or in change in environment like in water it will be pretty useful and efficient? |
| 2014-08-23 00:54:59 -0600 | asked a question | Why we use mainly HSV color space nor BGR color space for color detection? i also need to know that which color space is more efficient in calibrating and detection of colors in live video. |
| 2014-05-03 12:55:53 -0600 | commented question | Camera is not opening and getting frames it is just exiting with code 0. the console opens and close in 1 second in many programs. |
| 2014-05-03 12:51:17 -0600 | commented answer | Execution exiting after running the code. through your motivation i will definitely try it in future. i am getting some problem with my webcam, i will check it out soon and contact you later :) |
| 2014-05-01 03:45:29 -0600 | asked a question | Camera is not opening and getting frames i have tried different arguments, cvCreateCameraCapture,cvCaptureFromCAM but still not working |
| 2014-05-01 03:39:17 -0600 | commented answer | Execution exiting after running the code. flood of errors.. |
| 2014-04-24 05:38:03 -0600 | commented question | Execution exiting after running the code. thanks for your presence. it will be gratefull if you would take a llok at the above code if you have free time later. thanks alot. :) |
| 2014-04-24 05:34:08 -0600 | commented question | Execution exiting after running the code. how can i learn the c++ interface? means if want to to start learning it. |
| 2014-04-24 05:31:19 -0600 | commented question | Execution exiting after running the code. i am using the same. can you send me a code for color detection.? i can check for that. |
| 2014-04-24 05:27:07 -0600 | commented question | Execution exiting after running the code. so what should be the problem. why it is not working? when i am capturing a video, it works fine. :/ |
| 2014-04-24 05:18:52 -0600 | commented question | Execution exiting after running the code. now in console it's showing 'Null frame press any key to continue...' and than exits |
| 2014-04-24 05:12:05 -0600 | commented question | Execution exiting after running the code. its showing only a console for only 5 secs and exits. |
| 2014-04-24 05:00:53 -0600 | commented question | Execution exiting after running the code. but it is exiting in my pc. without opening windows and all. |
| 2014-04-24 04:55:52 -0600 | commented question | Execution exiting after running the code. help me, how to fix it. it will be very thankfull. |
| 2014-04-23 05:05:42 -0600 | received badge | ● Editor (source) |
| 2014-04-23 05:00:37 -0600 | commented answer | there is delay in image processing using panda board ok, thanks and also sorry brother :) i am budding user so did some mistakes. i will reply with full specifications later because as of now i can't disclose it. |
| 2014-04-23 04:50:10 -0600 | asked a question | Execution exiting after running the code. I am try to run the code but msv execution is exiting and sometimes it shows breakpoint error. P.S. code is copied. and errors are.. |
| 2014-04-14 23:33:28 -0600 | answered a question | there is delay in image processing using panda board I am usimg arduino omega for motor drivers and other peripherals and panda board for calibration. you can see the task on auvsi. |
| 2014-03-30 23:50:47 -0600 | asked a question | there is delay in image processing using panda board sir, i am currently working on an AUV, but there is delay in imgae processed by it. How the proformance can be improved. answers will be appreciated. |
 Code is-:
Code is-: