This forum is disabled, please visit https://forum.opencv.org
| 2019-08-07 09:56:14 -0600 | received badge | ● Notable Question (source) |
| 2019-06-20 22:42:10 -0600 | received badge | ● Nice Answer (source) |
| 2019-02-28 09:31:35 -0600 | received badge | ● Popular Question (source) |
| 2019-01-21 21:23:24 -0600 | received badge | ● Good Answer (source) |
| 2018-07-21 02:16:52 -0600 | received badge | ● Popular Question (source) |
| 2018-01-24 11:05:30 -0600 | received badge | ● Nice Answer (source) |
| 2017-12-29 02:07:23 -0600 | received badge | ● Enlightened (source) |
| 2017-12-27 08:37:01 -0600 | commented answer | c++ windows forms /CLR see here |
| 2017-12-27 08:35:21 -0600 | commented answer | GUI for OpenCv with visual studio I try to avoid having any code (other than the main form constructor) in the .h file. The code above goes in MyForm.cpp |
| 2017-08-01 07:50:47 -0600 | received badge | ● Good Answer (source) |
| 2017-03-03 08:58:10 -0600 | answered a question | transform 16bit grayscale to RGB with constants If I understand correctly, you have a 16 bit image, and then merge R,G, B into a color image Do not use pixel operations if you can avoid them. guy |
| 2017-02-17 14:00:39 -0600 | answered a question | Showing gray image in picturebox in Visual studio c++ I have not tried to put a grayscale image directly into the picturebox but rather converted the gray image to an RGB image and then put that. something like: guy |
| 2016-11-29 13:42:27 -0600 | commented answer | OpenCV IDE for developemnt sorry for the delay: here |
| 2016-11-21 16:47:41 -0600 | commented question | compare the size of two contours if you are interested in the length of the contour, you can use your factors but if you are interested in the area you should square them
|
| 2016-10-04 10:42:07 -0600 | answered a question | detect all range colors on image Hi, Do you need the actual pixel coordinates or just the number of pixels? If the latter you would probably be better off using guy |
| 2016-09-26 07:38:15 -0600 | answered a question | Error when get color from pixel in visual studio C++ Looks to me like you are trying to access a point outside your Mat. You need to explicitly check that the values of OpenCV checks this internally but throws an exception if they are not. guy |
| 2016-09-16 20:58:31 -0600 | answered a question | Accessing pixel intensity values 16 unsigned char I don't use floats but that seems like the right way to me.
For 16 bit I use guy |
| 2016-09-10 06:37:05 -0600 | commented answer | How to pass values to main function (vs2015,opencv,c++) Does the program crash before the first if not, what does the program think the values of guy |
| 2016-09-09 06:04:36 -0600 | received badge | ● Nice Answer (source) |
| 2016-09-08 15:04:12 -0600 | commented answer | GUI for OpenCv with visual studio you can just write the OpenCV code into the GUI control's callback function. I'll add an example to the answer, as there is no room in comments. |
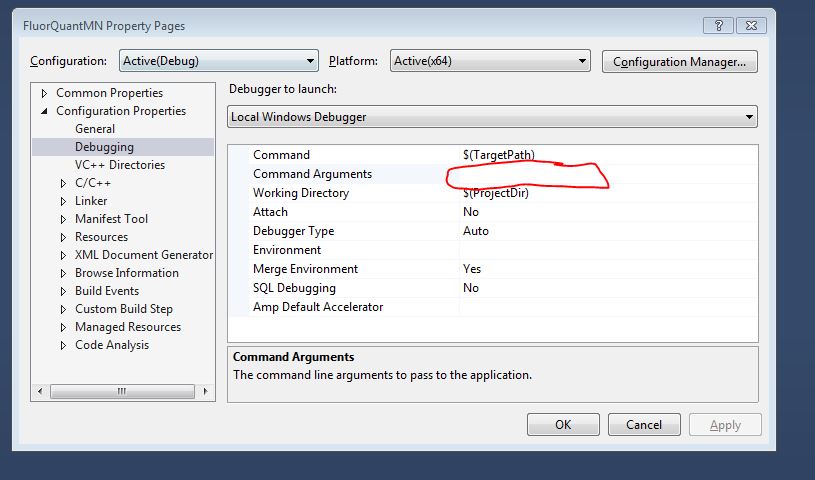
| 2016-09-08 12:27:18 -0600 | answered a question | How to pass values to main function (vs2015,opencv,c++) Go to the project properties and enter the arguments under "Debugging > Command Arguments"
guy |
| 2016-05-25 11:40:32 -0600 | answered a question | Watershed not segmenting correctly I think I found the problem. I was passing a binary image instead of a grayscale one to watershed. Fixing this seems to have almost solved my problem. I still get the background merged with one of the blobs, although it's not the last one anymore. guy |
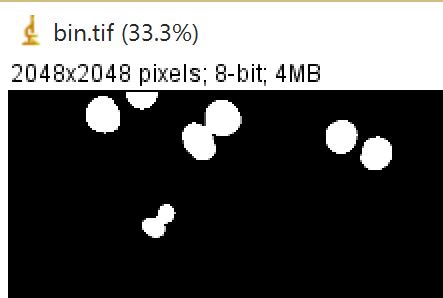
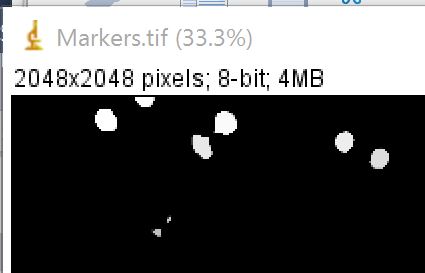
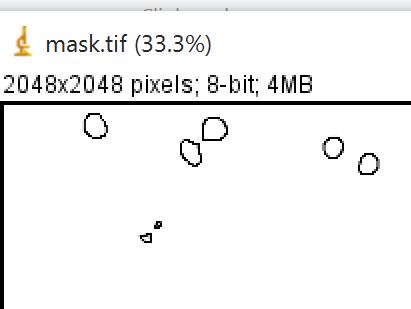
| 2016-05-23 15:16:54 -0600 | asked a question | Watershed not segmenting correctly Hi, I am trying to implement a watershed segmentation to separate touching blobs. I want to separate the blobs from each other but I am getting a separation of the blobs from each other and from the background. In my final segmented image, each blob has a halo like this, instead of just being an isolated blob: Original Image:
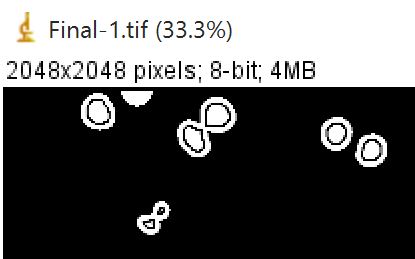
Segmented image:
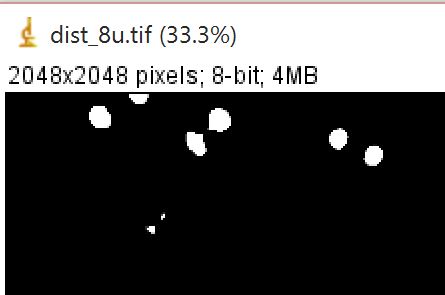
What am I doing wrong? Here is the code I am using: And the intermediate images:
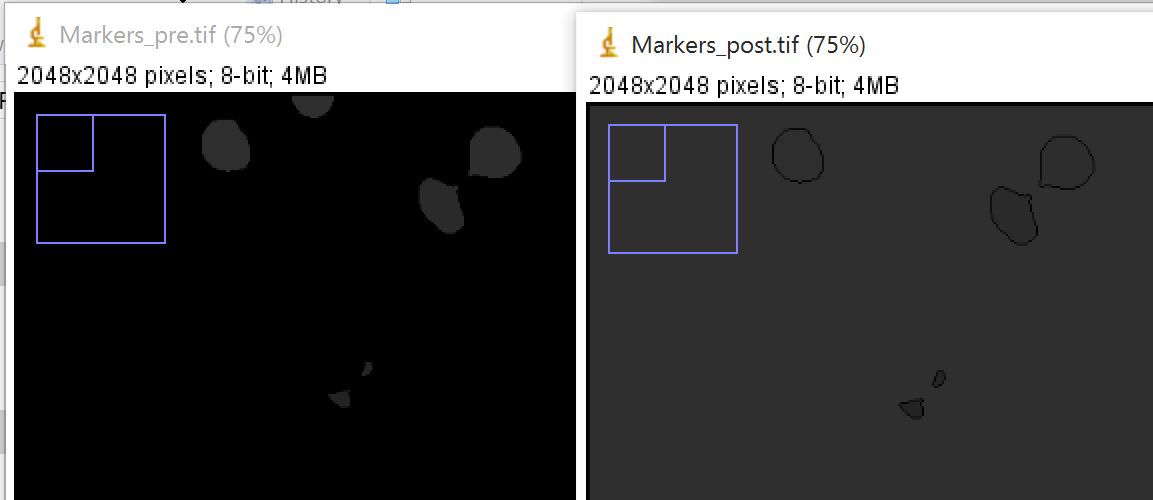
guy Edit: Some more info: Here is a side by side view of the Markers image before and after the watershed.
After the watershed, the last marker (the one cropped by the top of the image, and which was marker #ncomp) has expanded to fill all area not taken up by other markers. The black outlines in the post-watershed image follow the contours of the pre-watershed markers exactly. guy |
| 2016-05-20 12:51:00 -0600 | commented question | mat transpose .t() a Nx2 mat gives me a 1x2N output. How many channels does your Mat have? are you sure it is an Nx2 Mat and not a n Nx1 mat with two channels? |
| 2016-05-12 12:19:16 -0600 | commented answer | c++ windows forms /CLR I add the opencv .h files in the .cpp file for the form and not in the header. I try to not have any code at all (other than the form constructor and destructor) in the header. |
| 2016-04-25 13:18:21 -0600 | answered a question | opencv with windows form application (Visual Studio 13 GUI) c++ I usually start with a windows form application and add the openCV code in the callback functions. The form header just has the declarations for the form callbacks with the code in the associated cpp file. This is not the default for visual c++ but is the "proper" way to do things in C. Within the header I do not include any OpenCV elements. I put the at the top of the .cpp file. all Mat's are declared internally in the callback or as global variables at the .cpp level. in the project properties make sure to:
This works well for me. guy |
| 2016-04-25 12:02:37 -0600 | commented question | opencv with windows form application (Visual Studio 13 GUI) c++ Can you get a windows form application to work without OpenCV? guy |
| 2016-04-05 13:05:08 -0600 | answered a question | GUI for OpenCv with visual studio Visual studio provides tools to make forms in C++ but, starting with VS2012, they have made it difficult - they want you to make forms in C#, or VB not in C++. A good tutorial on how to make a windows forms application using Visual C++ 2013 is given here Basically you need your application to be a CLR application, rather than a console. You can then add GUI forms to it and call OpenCV from them. I have written several such applications and can help if you have more specific questions on interfacing OpenCV with CLR forms. guy Edit Here is an example.
The form |
| 2016-04-05 09:24:17 -0600 | commented question | Displaying image results in real time @StevenPuttemans: What would be the "correct" way to rapidly throw images on the screen in the final application (managed Visual C++)? My application works and was profiled and |
| 2016-03-31 20:54:29 -0600 | commented answer | find all the colors of a given image and their pixel position I'm sure @berak 's answer will do the trick for you, I was not familiar with the partition function. One small concern I have is that, per the documentation, the partition function is O(N^2) where I guess N would be the number of pixels in your image. My solution can be tweaked to run in linear time WRT the number of pixels. There will probably, be a (very) large overhead for memory allocation and initialization. so if you're not working with huge images I would try Berak's solution before mine. The problem I see with @Tetragramm 's solution is that there is no easy way to decide if the color of the pixel you are looking at was seen before, without checking a long list of color values one by one. You would probably want to figure out some way to sort the list of colors. guy |
| 2016-03-30 12:35:03 -0600 | answered a question | find all the colors of a given image and their pixel position Unless you have a >16 MegaPixel image, this is probably one of the rare occasions where looping over all pixels and performing pixel-wise operations would be the fastest. Here's how I would do it (trying to minimize required storage, even so this requires quite a lot): You would need
The type of both Mats should be What you then do is cycle through the pixels. For each pixel: Calculate its It's color values are If the value of the if it is not zero (say it is Finally, to get all the pixel values of a certain color, you would find the corresponding pixel in Good luck guy |
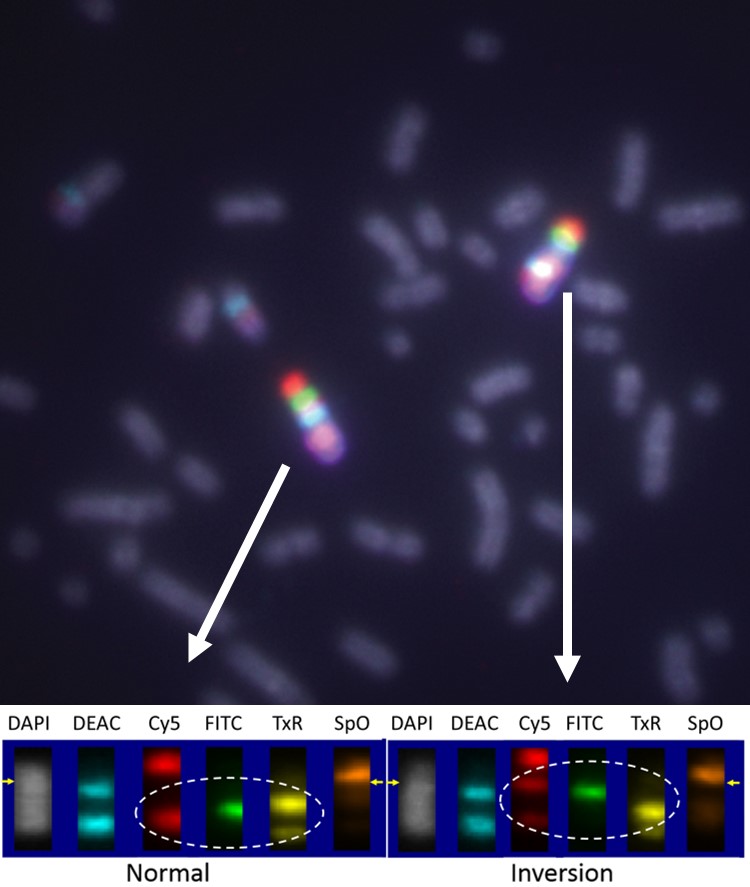
| 2016-03-30 10:03:04 -0600 | answered a question | why they are going for more channels in image processing? Another example: In fluorescence microscopy, you can get up to 6 different colors corresponding to different dyes used to stain your specimen. I believe 6 is the maximum with a standard (i.e. not hyperspectral) microscope. For example here are some pictures of an irradiated human chromosome, where different regions are painted with different dyes.
The order of bands indicates damage to the chromosome.
guy |
| 2016-03-16 13:33:14 -0600 | answered a question | Is it poosible to make OpenCV read multiple page tiff Re external libraries, that would depend on your OS and compiler.
Using Microsoft Visual C++ you can use a guy |
| 2016-03-12 14:40:39 -0600 | commented question | Reading pixel values from a binary file You may also want to multiply img by 16 to get 0x0000 1111 1111 1111 to display as white. |
| 2016-03-12 14:35:03 -0600 | commented question | Reading pixel values from a binary file There seems to be some mismatch with the size of your buffers: The image is 128x128x4 =65536 bytes you load it into an unsigned int buffer with double that size (I believe an unsigned int is 16 bit, and you have 65536 of them). At this point each pixel takes up TWO 16 bit ints. You then load into a signed 16 bit Mat. Each pixel in the original image is now on two pixels in the Mat. The fact that the Mat is signed while the data isn't will probably turn your blacks to 50% Gray. Your whites may be dim because you are displaying a 12 bit image when OpenCV is expecting 16 bits and probably scales brightness accordingly. I think LBerger's solution will work better for you with the following changes:
|
| 2016-02-27 22:24:36 -0600 | answered a question | Intersection of a contour and line in OpenCV c++? Your life may be easier if the line corresponded to a row of the image. That way you just do: The problem with this type of algorithm is that you would need to keep track that you don't count the same car in the next frame. If only one car at a time can cross the line, you would just need some sort of flag that only allows the counter to increment if there weren't any lit pixels on the line in the previous frame. If multiple cars can cross the line simultaneously, you will need to correlate between car i in one frame and car j in the other. This is much harder If the cars are relatively slow you could just look at the blob centroids and find the nearest one in the previous frame or maybe one that has moved in a predefined direction. If they are fast (i.e. motion between frames is larger than average distance between cars) you may need a more complex algorithm. guy |