This forum is disabled, please visit https://forum.opencv.org
| 2014-11-25 02:55:15 -0600 | commented question | OpenCV 2.4.9 + Asus Xtion Pro Live When you built opencv, did you set the -WITH_OPENNI flag? I had a similar problem when I didn't know that. If not you have to build it again with the right flags set. It could also be a problem with your openni/primesense version. But since you can launch the viewer that shouldn't be it. |
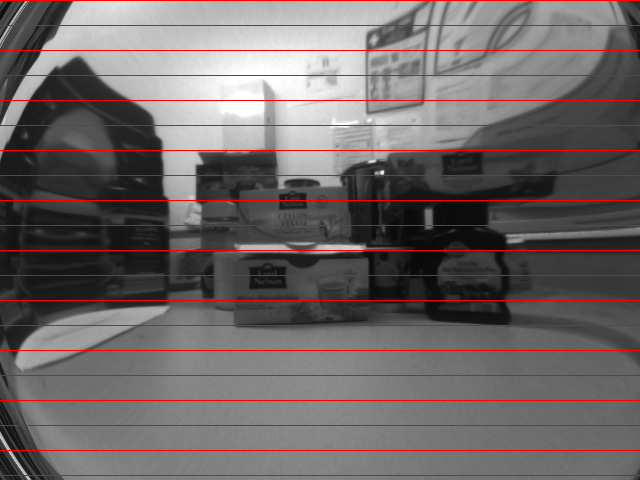
| 2014-11-25 02:26:40 -0600 | asked a question | Stereo Vision With Fisheye and FOV camera Hi, I have two stereo cameras with different focal length and a baseline of roughly 10cm. I performed an in- and extrinsic calibration using a tool based on Bouguets algorithm under http://www.vision.caltech.edu/bouguetj/calib_doc/ Here are the output I got: Intrinsic parameters of left camera (HD): Intrinsic parameters of right camera (Wide Angle): Extrinsic parameters (position of right camera wrt left camera): Translation vector: I then put the data into opencvs functions ->stereoRectify( ..., CALIB_USE_INTRINSIC_GUESS, -1 , ... ) ->initUndistortRectifyMap() -> remap(... INNTER_LINEAR)
In case you wonder why the fisheye image is still so much distorted at the outer parts, that is because I only calibrated the common viewing area of the two cameras.
to get the rectified version of left and right hand side images. Here is what the output looks like:
When I feed the rectified images then into the Stereo block matcher (StereoBM()) I do do not manage to get a good depth map from that. Also with other images I fail getting good results with this setup. Therefore my questions are:
Cheers! |
| 2013-11-23 17:44:08 -0600 | asked a question | OpenCV + QTCreator -> cannot read file from hard disk? Hi, I wanted to switch from Code::Blocks to QTCreator after formatting my hard disk. But when I want to use the code I was compiling before without any errors, I now get an errormessage when I execute the following: std::vector<cv::keypoint> key2 The error is related to the type of the vector, but why did it work before (in Code::Blocks) and how can I fix this? I'm using ubuntu 12.04 with opencv-2.4.7 and Qt Creator 2.4.1 . Thanks for helping. |