|
2014-02-12 08:22:43 -0600
| answered a question | How to compare two image and need result in percentage wise? |
|
2014-02-12 07:37:03 -0600
| received badge | ● Supporter
(source)
|
|
2014-02-10 06:28:59 -0600
| asked a question | Can't use KalmanFilter in Android I'm writing an apps it can track an objcet 's center point , but when i define the KalmanFilter it show me this  and this is my code public class KalmanFilter<boundingRect> extends Activity implements CvCameraViewListener2, OnTouchListener, Runnable, LocationListener{
private static final String TAG = "Kalman Filter";
private CameraBridgeViewBase mOpenCvCameraView;
private LocationManager myLocationManager;
private ColorBlobDetector mDetector;
private KalmanFilter KF = new KalmanFilter(1, 2, 16, CvType.CV_64F);
/*
*
*
*
*
*
*/
public Mat onCameraFrame(CvCameraViewFrame inputFrame) {
mRgba = inputFrame.rgba();
mGray = inputFrame.gray();
/*
*
* code for color detect
*
*/
CenterX = mRgba.width() / 2;
CenterY = mRgba.rows() / 2;
int ObjectCenterX = (int)((mboundingRect.tl().x + mboundingRect.br().x) / 2);
int ObjectCenterY = (int)((mboundingRect.tl().y + mboundingRect.br().y) / 2);
Core.circle(mRgba, new Point(ObjectCenterX, ObjectCenterY), 5, ColorGreen, 2);
try {
Mat KalmanObjectPoint = new Mat(CvType.CV_32F);
int[] KalmanPreObjectCenter = {ObjectCenterX, ObjectCenterY};
KalmanObjectPoint.put(0, 0, KalmanPreObjectCenter[0]);
KalmanObjectPoint.put(0, 1, KalmanPreObjectCenter[1]);
KalmanObjectPoint = myKalmanFilter(KalmanObjectPoint);
} catch (Exception e) {
Log.e("In camera fram: ", e.toString());
}
}
/***********************************Kalman filter***********************************************/
private Mat myKalmanFilter(Mat objectPoint){
Mat correctMat = new Mat(CvType.CV_64F);
Mat predictMat = new Mat(CvType.CV_64F);
try {
correctMat = objectPoint;
KF.correct(correctMat);
KF.predict(predictMat);
} catch (Exception e) {
Log.e("myKalmanFilter: ", e.toString());
}
return predictMat;
}
} any help ? |
|
2013-12-21 02:44:54 -0600
| received badge | ● Scholar
(source)
|
|
2013-12-20 06:56:25 -0600
| asked a question | Android - Object detect I'm trying to implement object tracking in with features detect , but I got the following error: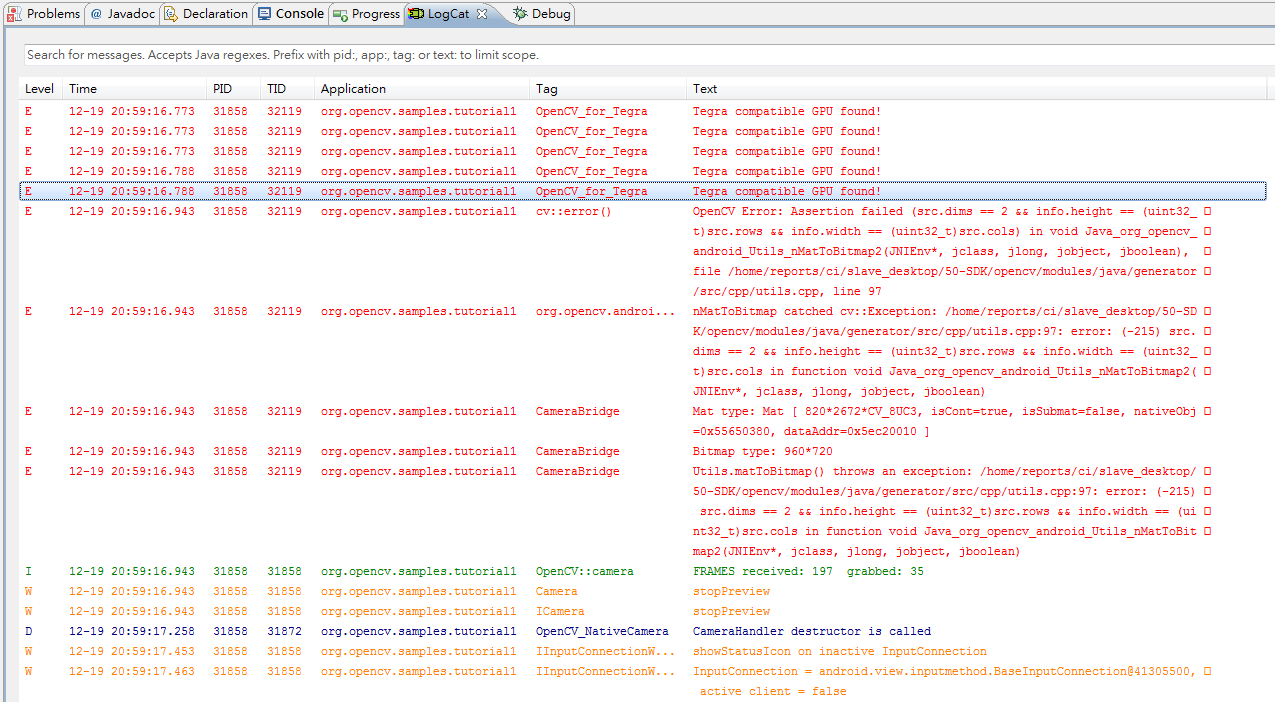 It no need to show the object on screen but I need mark the object what I want to track , and here is my code .
It no need to show the object on screen but I need mark the object what I want to track , and here is my code . public void onCameraViewStarted(int width, int height) {
mRgba = new Mat();
mGray = new Mat();
mView = new Mat();
mObject = new Mat();
}
public Mat onCameraFrame(CvCameraViewFrame inputFrame) {
mRgba = inputFrame.rgba();
switch (viewMode) {
case VIEW_MODE_RGBA:
return mRgba;
case VIEW_MODE_FeatureDetect:
try {
mGray = inputFrame.gray();
mObject = new Mat();
mObject = Highgui.imread(Environment.getExternalStorageDirectory()+ "/Android/data/" + getApplicationContext().getPackageName() + "/Files/Object.jpg", Highgui.CV_LOAD_IMAGE_GRAYSCALE);
mView = mGray.clone();
FeatureDetector myFeatureDetector = FeatureDetector.create(FeatureDetector.ORB);
MatOfKeyPoint keypoints = new MatOfKeyPoint();
myFeatureDetector.detect(mGray, keypoints);
MatOfKeyPoint objectkeypoints = new MatOfKeyPoint();
myFeatureDetector.detect(mObject, objectkeypoints);
DescriptorExtractor Extractor = DescriptorExtractor.create(DescriptorExtractor.ORB);
Mat sourceDescriptors = new Mat();
Mat objectDescriptors = new Mat();
Extractor.compute(mGray, keypoints, sourceDescriptors);
Extractor.compute(mGray, objectkeypoints, objectDescriptors);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE);
MatOfDMatch matches = new MatOfDMatch();
matcher.match(sourceDescriptors, objectDescriptors, matches);
Features2d.drawMatches(mGray, keypoints, mObject, objectkeypoints, matches, mView);
return mView;
} catch (Exception e) {
Log.d("Exception",e.getMessage());
}
}
return mRgba;
}
Sorry about my English , I hope you understand what I'm asking . Thanks for any suggestion . EDIT Thanks Moster's suggestion , I add the code Imgproc.resize(mView, mView, mGray.size());
after Features2d.drawMatches(mGray, keypoints, mObject, objectkeypoints, matches, mView); , and it can work . |
|
2013-12-02 02:47:15 -0600
| asked a question | Which smart phone support NativeCameraView? I want to know which smart phone with Android OS can support NativeCameraView , it had better publish in recent year. |
|
2013-11-29 04:54:13 -0600
| answered a question | Can't open Nativecamera with Nexus7 in android 4.3 I think my Nexus 7 is not support NativeCameravie , because it can work on HTC OneX |
|
2013-11-26 07:32:25 -0600
| received badge | ● Editor
(source)
|
|
2013-11-26 07:27:55 -0600
| asked a question | Can't open Nativecamera with Nexus7 in android 4.3 I was try with OpenCV tutorial 1 - Camera Preview , Javacameraview is work fine , but when I toggle to Nativecameraview the logchat show this I/OCVSample::Activity(4802): called onOptionsItemSelected; selected item: Toggle Native/Java camera
D/FpsMeter(4802): 14.66 FPS@1920x1080
D/JavaCameraView(4802): Disconnecting from camera
D/JavaCameraView(4802): Notify thread
D/JavaCameraView(4802): Wating for thread
D/JavaCameraView(4802): Finish processing thread
D/CameraBridge(4802): call surfaceChanged event
D/OpenCV::camera(4802): CvCapture_Android::CvCapture_Android(0)
D/OpenCV::camera(4802): Library name: libopencv_java.so
1D/OpenCV::camera(4802): Library base address: 0x738ca000
D/OpenCV::camera(4802): Libraries folder found: /data/app-lib/org.opencv.engine-1/
D/OpenCV::camera(4802): CameraWrapperConnector::connectToLib: folderPath=/data/app-lib/org.opencv.engine-1/
E/OpenCV::camera(4802): ||libnative_camera_r2.3.3.so
E/OpenCV::camera(4802): ||libnative_camera_r4.3.0.so
E/OpenCV::camera(4802): ||libnative_camera_r4.2.0.so
E/OpenCV::camera(4802): ||libnative_camera_r2.2.0.so
E/OpenCV::camera(4802): ||libnative_camera_r4.0.0.so
E/OpenCV::camera(4802): ||libnative_camera_r4.0.3.so
E/OpenCV::camera(4802): ||libnative_camera_r4.1.1.so
E/OpenCV::camera(4802): ||libnative_camera_r3.0.1.so
D/OpenCV::camera(4802): try to load library 'libnative_camera_r4.3.0.so'
D/OpenCV::camera(4802): Loaded library '/data/app-lib/org.opencv.engine-1/libnative_camera_r4.3.0.so'
D/OpenCV_NativeCamera(4802): CameraHandler::initCameraConnect(0x73ef229d, 0, 0x70a92748, 0x0)
D/OpenCV_NativeCamera(4802): Current process name for camera init: org.opencv.samples.tutorial1
D/OpenCV_NativeCamera(4802): Instantiated new CameraHandler (0x73ef229d, 0x70a92748)
I/OpenCV_NativeCamera(4802): initCameraConnect: [antibanding=auto;antibanding-values=off,60hz,50hz,auto;auto-exposure-lock=false;auto-exposure-lock-supported=true;auto-whitebalance-lock=false;auto-whitebalance-lock-supported=true;effect=none;effect-values=none,mono,negative,solarize,sepia,posterize,whiteboard,blackboard,aqua;exposure-compensation=0;exposure-compensation-step=0.166667;flash-mode=off;flash-mode-values=off;focal-length=2.95;focus-areas=(0,0,0,0,0);focus-distances=Infinity,Infinity,Infinity;focus-mode=auto;focus-mode-values=infinity,auto,macro,continuous-video,continuous-picture;horizontal-view-angle=63.8164;jpeg-quality=90;jpeg-thumbnail-height=288;jpeg-thumbnail-quality=90;jpeg-thumbnail-size-values=512x288,480x288,256x154,432x288,320x240,176x144,0x0;jpeg-thumbnail-width=512;max-exposure-compensation=12;max-num-detected-faces-hw=0;max-num-detected-faces-sw=0;max-num-focus-areas=1;max-num-metering-areas=1;max-zoom=99;metering-areas=(0,0,0,0,0);min-exposure-compensation=-12;picture-format=jpeg;picture-format-values=jpeg;pic
D/OpenCV_NativeCamera(4802): Supported Cameras: (null)
D/OpenCV_NativeCamera(4802): Supported Picture Sizes: 2592x1944,2048x1536,1920x1080,1600x1200,1280x768,1280x720,1024x768,800x600,800x480,720x480,640x480,352x288,320x240,176x144
D/OpenCV_NativeCamera(4802): Supported Picture Formats: jpeg
D/OpenCV_NativeCamera(4802): Supported Preview Sizes: 1920x1080,1280x720,800x480,768x432,720x480,640x480,576x432,480x320,384x288,352x288,320x240,240x160,176x144
D/OpenCV_NativeCamera(4802): Supported Preview Formats: yuv420p,yuv420sp
D/OpenCV_NativeCamera(4802): Supported Preview Frame Rates: 15,24,30
D/OpenCV_NativeCamera(4802): Supported Thumbnail Sizes: 512x288,480x288,256x154,432x288,320x240,176x144,0x0
D/OpenCV_NativeCamera(4802): Supported Whitebalance Modes: auto,incandescent,fluorescent,warm-fluorescent,daylight,cloudy-daylight,twilight,shade
D/OpenCV_NativeCamera(4802): Supported Effects: none,mono,negative,solarize,sepia,posterize,whiteboard,blackboard,aqua
D/OpenCV_NativeCamera(4802): Supported Scene Modes: auto,landscape,snow,beach,sunset,night,portrait,sports,steadyphoto,candlelight,fireworks,party,night-portrait,theatre,action
D/OpenCV_NativeCamera(4802): Supported Focus Modes: infinity,auto,macro,continuous-video,continuous-picture
D/OpenCV_NativeCamera(4802): Supported Antibanding Options: off,60hz,50hz,auto
D/OpenCV_NativeCamera(4802 ... (more) |
|
2013-11-20 05:28:27 -0600
| commented question | grab() always returning false I got similar problem , my code is like this
' public Mat onCameraFrame(CvCameraViewFrame inputFrame) {
mRgba = inputFrame.rgba();
mGray = inputFrame.gray();
VideoCapture mcapture = new VideoCapture(0);
mcapture.open(Highgui.CV_CAP_ANDROID_COLOR_FRAME);
if(!mcapture.isOpened()){
Core.putText(mRgba, "Capture Fail", new Point(50, 50), BIND_AUTO_CREATE, BIND_AUTO_CREATE, Color_Green);
}else{
Mat frame = new Mat();
Imgproc.cvtColor(mRgba, frame, Imgproc.COLOR_RGB2GRAY);
mcapture.retrieve(frame, 3);
mRgba = frame; }
return mRgba;
}'
but mcapture.isOpened() is always false |
|
2013-11-19 08:12:35 -0600
| asked a question | findHomography - The line come out not around object I'm doing feature matching. For now , I can find features and draw descriptor but the line came out was not around the object even not a rectangle , I stuck on it for few days.
Thanks for the help.
here is my resoult private void Featrue_found(){
MatOfKeyPoint templateKeypoints = new MatOfKeyPoint();
MatOfKeyPoint keypoints = new MatOfKeyPoint();
MatOfDMatch matches = new MatOfDMatch();
Object = new Mat(CvType.CV_32FC2);
Object = Highgui.imread(Environment.getExternalStorageDirectory()+ "/Android/data/" + getApplicationContext().getPackageName() + "/Files/Object.jpg", Highgui.CV_LOAD_IMAGE_UNCHANGED);
Resource = new Mat(CvType.CV_32FC2);
Resource = Highgui.imread(Environment.getExternalStorageDirectory()+ "/Android/data/" + getApplicationContext().getPackageName() + "/Files/Resource.jpg", Highgui.CV_LOAD_IMAGE_UNCHANGED);
Mat imageOut = Resource.clone();
//Don't use "FeatureDetector.FAST" result was too bad
//"FeatureDetector.SURF"、"FeatureDetector.SURF" non-free method
//"FeatureDetector.ORB" is better for now
//FeatureDetector.SIFT cna't use
FeatureDetector myFeatures = FeatureDetector.create(FeatureDetector.ORB);
myFeatures.detect(Resource, keypoints);
myFeatures.detect(Object, templateKeypoints);
DescriptorExtractor Extractor = DescriptorExtractor.create(DescriptorExtractor.ORB);
Mat descriptors1 = new Mat();
Mat descriptors2 = new Mat();
Extractor.compute(Resource, keypoints, descriptors1);
Extractor.compute(Resource, templateKeypoints, descriptors2);
//add Feature descriptors
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE);
matcher.match(descriptors1, descriptors2, matches);
List<DMatch> matches_list = matches.toList();
MatOfDMatch good_matches = new MatOfDMatch();
double max_dist = 0; double min_dist = 99;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors1.rows(); i++ )
{
double dist = matches_list.get(i).distance;
if( dist < min_dist )
min_dist = dist;
if( dist > max_dist )
max_dist = dist;
}
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
for( int i = 0; i < descriptors1.rows(); i++ )
{
if( matches_list.get(i).distance < 3*min_dist ){
MatOfDMatch temp = new MatOfDMatch();
temp.fromArray(matches.toArray()[i]);
good_matches.push_back(temp);
}
}
Features2d.drawMatches(Resource, keypoints, Object, templateKeypoints, good_matches, imageOut);
LinkedList<Point> objList = new LinkedList<Point>();
LinkedList<Point> sceneList = new LinkedList<Point>();
List<DMatch> good_matches_list = good_matches.toList();
List<KeyPoint> keypoints_objectList = templateKeypoints.toList();
List<KeyPoint> keypoints_sceneList = keypoints.toList();
for(int i = 0; i<good_matches_list.size(); i++)
{
objList.addLast(keypoints_objectList.get(good_matches_list.get(i).queryIdx).pt);
sceneList.addLast(keypoints_sceneList.get(good_matches_list.get(i).trainIdx).pt);
}
MatOfPoint2f obj = new MatOfPoint2f();
obj.fromList(objList);
MatOfPoint2f scene = new MatOfPoint2f();
scene.fromList(sceneList);
//findHomography
//Mat hg = Calib3d.findHomography(obj, scene);
Mat hg = Calib3d.findHomography(obj, scene, Calib3d.RANSAC, min_dist);
Mat obj_corners = new Mat(4,1,CvType.CV_32FC2);
Mat scene_corners = new Mat(4,1,CvType.CV_32FC2);
obj_corners.put(0, 0, new double[] {0,0});
obj_corners.put(1, 0, new double[] {Object.cols(),0});
obj_corners.put(2, 0, new double[] {Object.cols(),Object.rows()});
obj_corners.put(3, 0, new double[] {0,Object.rows()});
//obj_corners:input
Core.perspectiveTransform(obj_corners, scene_corners, hg);
Core.line(imageOut, new Point(scene_corners.get(0,0)), new Point(scene_corners.get(1,0)), new Scalar(0, 255, 0),4);
Core.line(imageOut, new Point(scene_corners.get(1,0)), new Point(scene_corners.get(2,0)), new Scalar(0, 255, 0),4);
Core.line(imageOut, new Point(scene_corners.get(2,0)), new Point(scene_corners.get(3,0)), new Scalar(0, 255, 0),4);
Core.line(imageOut, new Point(scene_corners.get(3,0)), new Point(scene_corners.get(0,0)), new Scalar(0, 255, 0),4 ...
(more) |