This forum is disabled, please visit https://forum.opencv.org
| 2020-08-05 15:10:57 -0600 | received badge | ● Popular Question (source) |
| 2020-06-08 12:45:30 -0600 | received badge | ● Popular Question (source) |
| 2014-03-31 01:06:05 -0600 | received badge | ● Student (source) |
| 2014-03-19 20:41:47 -0600 | commented answer | Stereocalibration coordinate origin question never mind, I found the answer in the documentation under cv::stereorectify. Thanks! |
| 2014-03-13 13:58:33 -0600 | received badge | ● Editor (source) |
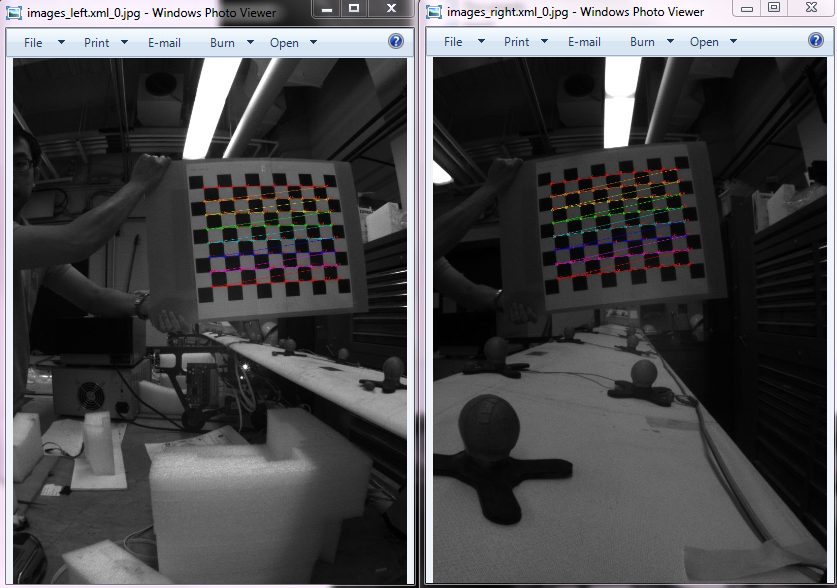
| 2014-03-13 13:55:39 -0600 | asked a question | Stereorectify ROI Valid? I'm doing a stereovision setup. With 2 cameras mounted above a wing. The left camera is tilted a few degree inwards while the right camera in parallel with the wing. Image of left and right view are here
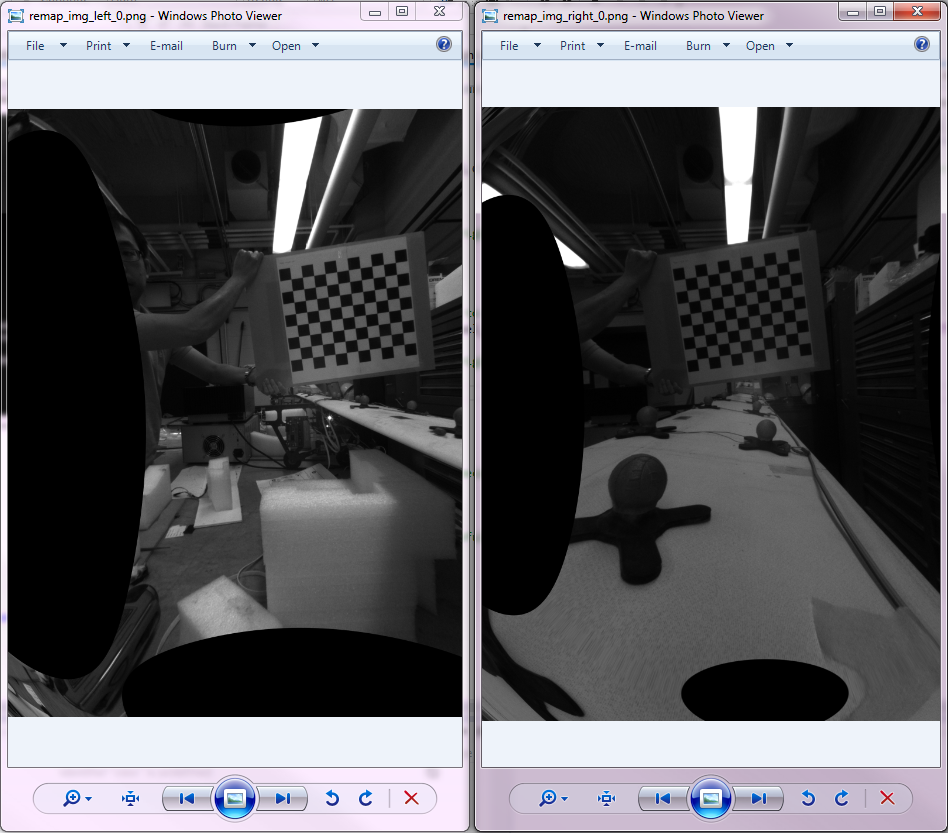
So i performed stereocalibration using the following code. The reprojection error returned by cv::stereocalibrate is 0.6044. (note: snippets of code, cut and pasted, but does not compile as is) The remapped images using and are here
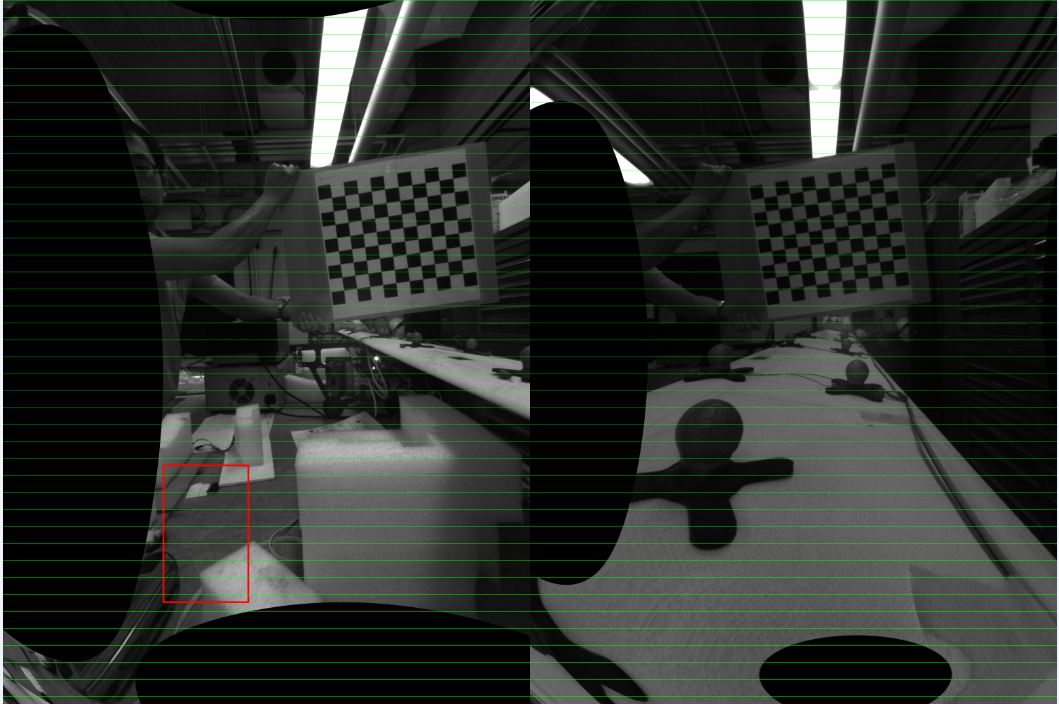
Question: Shouldn't the black remapped region from the right image be on the right side (since we're forming a frontal parallel configuration in stereorectify? Also, the ROI regions returned is strange, denoted by red box here in the stitched image The ROI region is clearly incorrect, but the stereorectified image seems good. Question: Why is this so? |
| 2014-03-10 15:46:15 -0600 | commented answer | Stereocalibration coordinate origin question What about a top/bottom stereo-calibration? |
| 2013-10-17 16:09:28 -0600 | received badge | ● Supporter (source) |
| 2013-10-17 15:11:02 -0600 | received badge | ● Scholar (source) |
| 2013-10-16 15:20:21 -0600 | asked a question | Stereocalibration coordinate origin question Hi, I have a question about the origin of the stereocalibration. I have a pair of cameras calibrated using cv::stereocalibrate. I wish to recover 3D physical coordinates of specific points in the image using cv::triangulatepoints. The question is where is the origin and the axis orientation of the recovered (X,Y,Z) physical coordiantes? I didn't find information in opencv documentation. In "Learning OpenCV: Computer Vision with the Opencv" by Gary Bradski, Adrian Kaehler, the authors defined the origin to be center of projection of the left camera, with X positive towards right camera, Y downwards and Z away from camera. Is this right? |