This forum is disabled, please visit https://forum.opencv.org
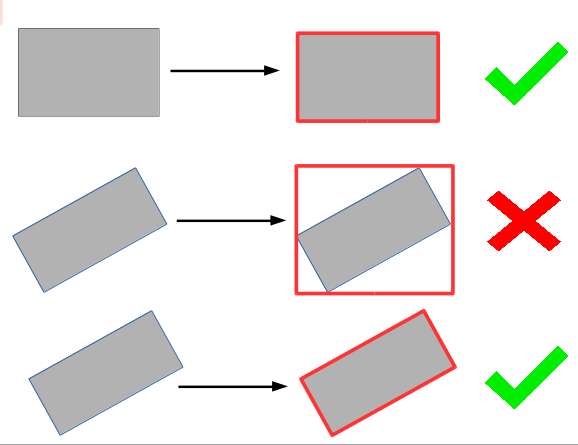
| 2016-11-03 09:12:22 -0600 | asked a question | Drawing Bounding Box for a rotated object Hi guys I have a video stream where the objects( boxes) move in any direction and in any pose. I want to track each and every object. So this is what i did: 1) I found the contours of the object 2) drew bounded boxes around the objects. 3) Calculated the centroid of the bounded box and tracked the objects. All these works fine. But the centroid of the bounded box is not exactly equal to the center of the object when the object rotates or is in some other pose. I want the bounded box also to rotate and fit to the shape of the box. When this happens the center of the bounded box is equal to the center of the object. This will also improve my tracking accuracy. See the picture attached:
If Bounded box is not a solution, is there any there method to find the center of the object My object is always box shaped and also only the top surface of the object is seen on the video stream. |
| 2016-10-27 07:23:44 -0600 | commented question | Transforming Point Cloud to get Top Down image edit @berak My tracking is not texture based. So i just need a stream of images where there would be objects moving and i can track that. Do you have any idea on how to convert a point cloud to a mat Image |
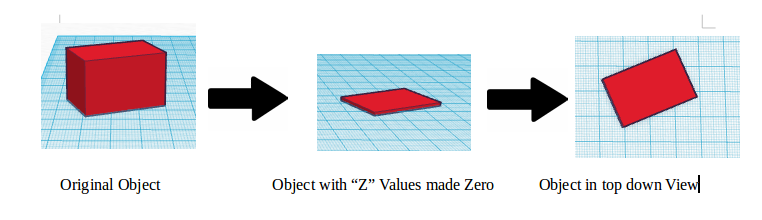
| 2016-10-24 19:06:05 -0600 | asked a question | Transforming Point Cloud to get Top Down image edit Hi My task : I have a task where i am asked to track parcels(carton boxes) of different dimensions moving on a conveyor. I am using Asus Xtion pro camera mounted on top of a conveyor in any inclined angle. I am looking for a model free object tracker that will detect boxes in the scene,track them & gives their 6DOF ? My target object is just a box and i want to eliminate all other things in the scene. My approach : Step 1) I do Point cloud preprocessing like downsampling,pass through filtering and segmentation. All these should give me a final point cloud containing only the objects on the conveyor. Step 2) I planned to make the "z" values in each point(depth value) as zero, thereby making the point cloud of the box to be flat on the ground. step 3) I planned to transfer the view of the camera from any inclined position to a top down view so that i can view any number of carton boxes moving on the conveyor from a top down view . I feel the top down view will prevent perpective viewing problems The process flow of step 2 and 3 is shown below:
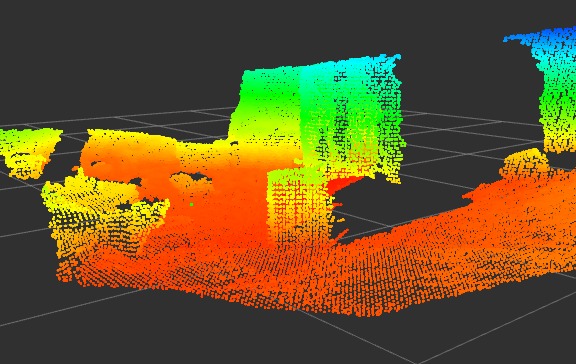
step 4) After the top down view of the point cloud is achieved, i need to convert the 3d point cloud to 2d image ,so that i can perform object tracking with so many OpenCV based tracking algorithms available. A Sample point cloud is shown below in different views Original View from camera:
Point Cloud View 1:
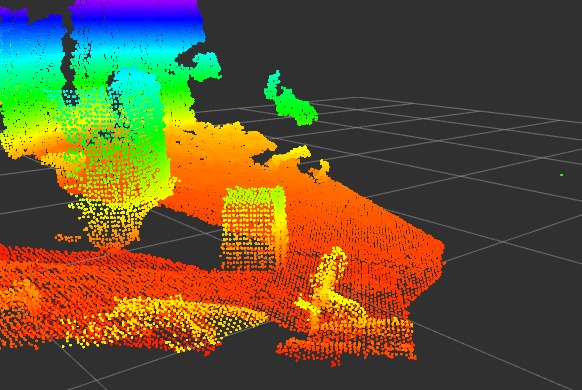
Point Cloud View 2:
Point Cloud Target/Desired View for converting to 2d :(The box is the target.All the ground plane and unnecessary points would be eliminated)
Is my approach correct? How will i achieve steps 2,3 and 4? |
| 2016-10-24 07:39:57 -0600 | commented answer | 3D object Tracking http://personal.ee.surrey.ac.uk/Perso... This was really interesting, but i don't know if it will fit my needs |
| 2016-10-20 13:48:08 -0600 | commented answer | 3D object Tracking as i said the boxes can be of different dimensions, i can't use a model to perform feature matching. I am really confused if i should be using point cloud library or opencv for this. is there a solution? |
| 2016-10-20 13:47:54 -0600 | commented answer | 3D object Tracking I would tell u what i have done till now: 1) I am using two cameras and hence did internal calibration of two cameras. 2) Using alvar markers, i set up a world frame on the conveyor and then transformed the views of these two cameras from their respective camera frame to the world coordinate frame that i created with the alvar markers and finally stitched the images from the two cameras in world frame. 3) did point cloud pre processing like downsampling, pass through and clustering. Now the resultant view gives me point clouds with only the boxes with some noise., Next i need to measure the box dimesions and then perform tracking of the box. I tried bounding box method with PCL but it does not suit because it just draws a box on top of the object irrespective of the pose of the object. |
| 2016-10-20 10:23:21 -0600 | asked a question | 3D object Tracking I have a task where i am asked to track parcels(carton boxes) of different dimensions moving on a conveyor I am using Asus Xtion pro camera mounted on top of a conveyor in any inclined angle.r I have read so many model-based methods where we need to create a model of the object to be detected and then we perform keypoints extraction,feature mapping and so many other concepts between the scene and the model. Since i am using Boxes of different dimensions, i definitely need a model of each of them to match with the scene. I don't want a model based tracker because, i need to create separate models of a box of all dimensions that my tracker will track. My question : Is there a model free object tracker that will detect boxes in the scene,calculate its dimensions and gives their 6DOF and track them? My target object is just a box and i want to eliminate all other things in the scene. Thanks in advance |