This forum is disabled, please visit https://forum.opencv.org
| 2019-08-09 17:57:10 -0600 | received badge | ● Self-Learner (source) |
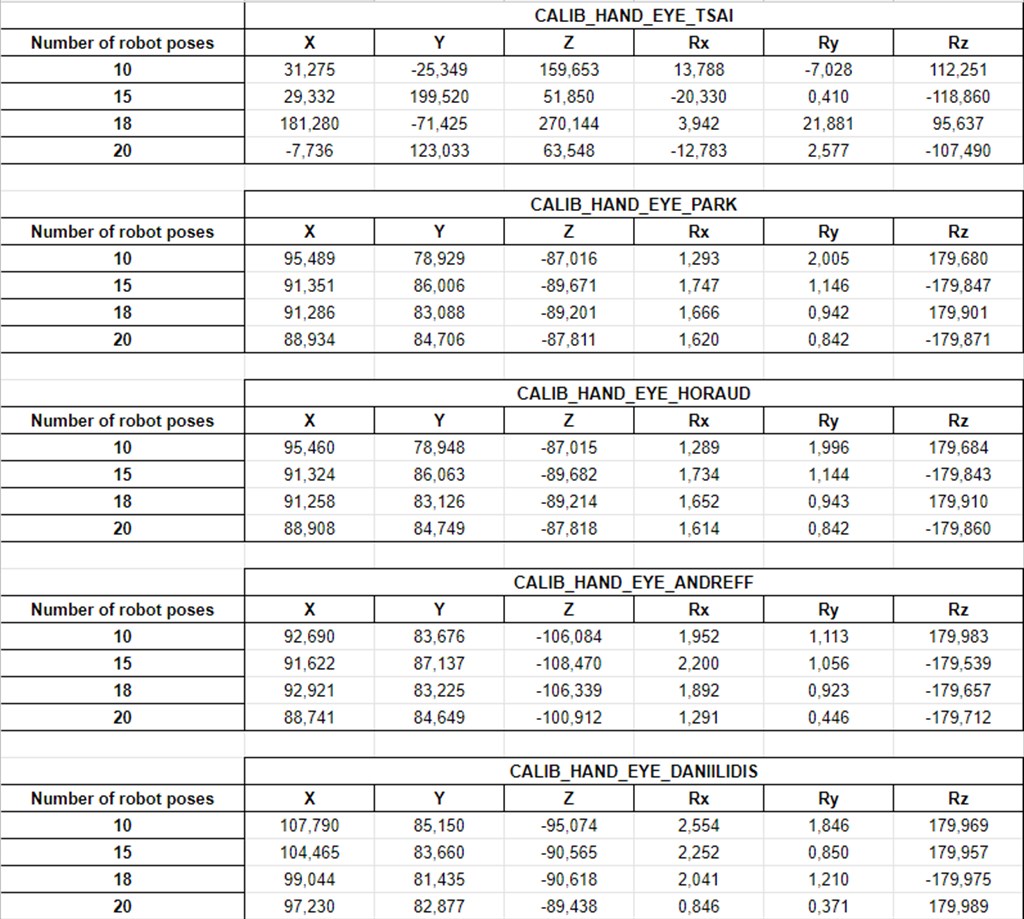
| 2019-08-09 12:42:12 -0600 | marked best answer | calibrateHandEye precision Hi there! I am using the calibrateHandEye functions from the Calib3d library to get the handEye calibration of a UR10 robot with a camera RealSense fixed to the end effector. After some problems I think, that I got to get the function work properly. But now I am seeing two things that do not fit completely, and I was hoping for a third opinion from your point of view. As you can see from the image below, I made 4 four measurements for each of the 5 methods that the function proposes. For each of the methods I used 10, 15, 18 and 20 robot poses with their respective pictures. From here I got a little confused:
Thank you for the help! The camera intrinsic parameters are: Link to get the images and poses.
|
| 2019-08-09 12:42:12 -0600 | received badge | ● Scholar (source) |
| 2019-08-09 12:42:11 -0600 | edited answer | calibrateHandEye precision The problem was with the calibration of the camera itself. I was assuming, in the OpenCV calibration, that the aspect r |
| 2019-08-09 12:41:04 -0600 | answered a question | calibrateHandEye precision The problem was with the calibration of the camera itself. I was assuming, in the OpenCV calibration, that the aspect r |
| 2019-08-07 19:29:07 -0600 | received badge | ● Student (source) |
| 2019-08-07 13:59:49 -0600 | commented question | calibrateHandEye precision I am using a force sensor, there is no problem to hit the object. I am more concerned about the precision in the x, y co |
| 2019-08-07 13:34:35 -0600 | marked best answer | Wrong result in calibrateHandEye function [answered] I am working in a robot application, in which I have a camera fixed to a robot gripper. In order to calculate the matrix transformation between the camera and the gripper Hcg I am using the calibrateHandEye new function provided in the OpenCV version 4.1. In the next picture, you can see the description of the function from the OpenCV documentation
To use this function I am editing the camera_calibration example of samples\cpp\tutorial_code\calib3d\ I had taken 10 pictures of the chessboard from the camera mounted in the gripper and at the same time I recorded the robot position. I changed the code, now It looks like: |
| 2019-08-07 12:37:28 -0600 | commented question | calibrateHandEye precision What's the difference in the chessboard you are suggesting? I don't see any difference, besides the size of the squares |
| 2019-08-07 12:36:20 -0600 | commented question | calibrateHandEye precision What's the difference in the chessboard you are suggesting? I don't see any difference, besides the size of the squares |
| 2019-08-07 12:36:06 -0600 | commented question | calibrateHandEye precision What's the difference in the chessboard you are suggesting? I don't see any difference, besides the size of the squares |
| 2019-08-07 12:25:33 -0600 | commented question | calibrateHandEye precision Thank you so much for the feedback, Eduardo. Also for me, the results of the Tsai method were weird. It seems like a bug |
| 2019-08-07 11:23:24 -0600 | commented question | calibrateHandEye precision Sure, it's done! I got the calibration with the same images of the link above. |
| 2019-08-07 11:22:40 -0600 | commented question | calibrateHandEye precision Sure, it's done! |
| 2019-08-07 11:22:37 -0600 | edited question | calibrateHandEye precision calibrateHandEye precision Hi there! I am using the calibrateHandEye functions from the Calib3d library to get the hand |
| 2019-08-07 08:15:52 -0600 | edited question | calibrateHandEye precision calibrateHandEye precision Hi there! I am using the calibrateHandEye functions from the Calib3d library to get the hand |
| 2019-08-07 08:15:32 -0600 | commented question | calibrateHandEye precision Hi Eduardo! Good to see you again helping with this. I added to the original question a link to download the images and |
| 2019-08-07 08:15:01 -0600 | commented question | calibrateHandEye precision Hi Eduardo! Good to see you again helping with this. I added to the original question a link to download the images and |
| 2019-08-07 08:08:05 -0600 | edited question | calibrateHandEye precision calibrateHandEye precision Hi there! I am using the calibrateHandEye functions from the Calib3d library to get the hand |
| 2019-08-06 16:57:57 -0600 | commented question | calibrateHandEye precision In the picture assume the ',' are '.' That´s the Spanish way, sorry for that. Is in mm and degrees |
| 2019-08-06 16:57:16 -0600 | commented question | calibrateHandEye precision In the picture assume the ',' are '.' That´s the Spanish way, sorry for that. |
| 2019-08-06 16:08:12 -0600 | answered a question | Wrong result in calibrateHandEye function [answered] I actually managed to solve this problem. The general idea was correct, but: I was not understanding correctly the vec |
| 2019-08-06 16:07:31 -0600 | asked a question | calibrateHandEye precision calibrateHandEye precision Hi there! I am using the calibrateHandEye functions from the Calib3d library to get the hand |
| 2019-08-01 10:34:01 -0600 | received badge | ● Enthusiast |
| 2019-07-12 09:17:27 -0600 | commented question | Wrong result in calibrateHandEye function [answered] No, the input values are different. MVTec uses a different calibration board, so the images are different and the poses |
| 2019-07-12 09:15:38 -0600 | commented question | Wrong result in calibrateHandEye function [answered] No, the input values are different. MVTec uses a different calibration board, so the images are different and the poses |
| 2019-07-12 09:08:31 -0600 | commented question | Wrong result in calibrateHandEye function [answered] I rechecked the information of the robot, it seems that the rotation matrix is calculated in the way ZYX: The RPY vecto |
| 2019-07-12 08:57:50 -0600 | commented question | Wrong result in calibrateHandEye function [answered] I rechecked the information of the robot, it seems that the rotation matrix is calculated in the way ZYX: The RPY vecto |
| 2019-07-12 08:41:14 -0600 | commented question | Wrong result in calibrateHandEye function [answered] Yeah, I checked the frames many times now the best I could... |
| 2019-07-12 08:39:38 -0600 | commented question | Wrong result in calibrateHandEye function [answered] Hi Eduardo. Thanks for the interest. The other software is Halcon from MVTec. I got a trial license but is almost finis |
| 2019-07-12 08:32:38 -0600 | edited question | Wrong result in calibrateHandEye function [answered] Wrong result in calibrateHandEye function I am working in a robot application, in which I have a camera fixed to a robot |
| 2019-07-12 08:29:15 -0600 | edited question | Wrong result in calibrateHandEye function [answered] Wrong result in calibrateHandEye function I am working in a robot application, in which I have a camera fixed to a robot |
| 2019-07-12 08:03:51 -0600 | edited question | Wrong result in calibrateHandEye function [answered] Wrong result in calibrateHandEye function I am working in a robot application, in which I have a camera fixed to a robot |
| 2019-07-12 08:02:38 -0600 | commented question | Wrong result in calibrateHandEye function [answered] The robot doesn´t give the quaternion or rotation matrix. I can only extract the information about the orientation as RP |
| 2019-07-12 08:02:20 -0600 | commented question | Wrong result in calibrateHandEye function [answered] The robot doesn´t give the quaternion or rotation matrix. I can only extract the information about the orientation as RP |
| 2019-07-12 08:01:28 -0600 | commented question | Wrong result in calibrateHandEye function [answered] The robot doesn´t give the quaternion or rotation matrix. I can only extract the information about the orientation as RP |
| 2019-07-11 15:11:32 -0600 | received badge | ● Editor (source) |
| 2019-07-11 15:11:32 -0600 | edited question | Wrong result in calibrateHandEye function [answered] Wrong result in calibrateHandEye function I am working in a robot application, in which I have a camera fixed to a robot |
| 2019-07-10 14:34:03 -0600 | asked a question | Wrong result in calibrateHandEye function [answered] Wrong result in calibrateHandEye function I am working in a robot application, in which I have a camera fixed to a robot |