This forum is disabled, please visit https://forum.opencv.org
| 2016-03-13 03:30:11 -0600 | received badge | ● Enthusiast |
| 2016-03-10 18:23:49 -0600 | commented question | Practical question about global frame for 5 independent cameras Thank you for your reply. I will start with the calibration using the chessboard. |
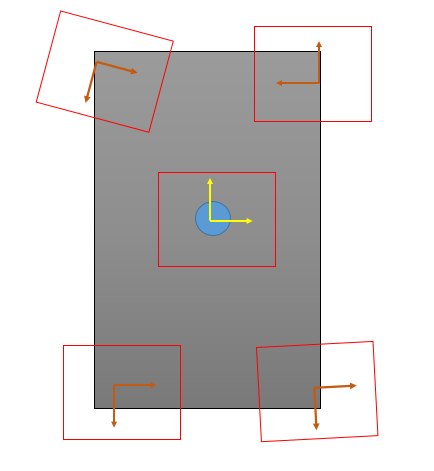
| 2016-03-09 00:56:58 -0600 | asked a question | Practical question about global frame for 5 independent cameras Hi community. A have a question and I am looking for comments and/or practical ideas. Considering 5 independent cameras which FOV are not intersected (so we cannot use epipolar lines). How I can create a global frame (yellow frame at the center of the object)? How do I know the transformation matrix, rotation and translation, of each camera frame related to a global frame? Do I need to calibrate the camera and find the intrinsic and extrinsic parameters? If we know the size of the object (gray rectangle) and considering the object has no rotation and the global frame will be set at the middle of it, do I need to use line/circle/corner detection to define the rotation of the camera frames? Any suggestion or idea will be appreciate. I personally think the answer is easier and just require practical knowledge but I am newbie on computer vision.
|