This forum is disabled, please visit https://forum.opencv.org
| 2020-11-17 11:16:24 -0600 | received badge | ● Nice Answer (source) |
| 2018-10-09 01:43:09 -0600 | asked a question | Why the optical center stay unchanged when do stereRectify Why the optical center stay unchanged when do stereRectify I find that the stereo rectify algorithm always keep the opti |
| 2018-09-29 19:27:27 -0600 | received badge | ● Student (source) |
| 2018-07-02 10:01:28 -0600 | edited question | why the scale factor is fixed in BinaryDescriptor why the scale factor is fixed in BinaryDescriptor I find that the scale factor in BinaryDescriptor::detect() is fixed to |
| 2018-07-02 10:00:37 -0600 | asked a question | why the scale factor is fixed in BinaryDescriptor why the scale factor is fixed in BinaryDescriptor I find that the scale factor in BinaryDescriptor::detect() is fixed to |
| 2017-04-01 08:27:10 -0600 | commented question | how can I find some information related to contributing opencv_contrib Actually, I try to implement a face alignment algorithm published on CVPR. I added a CMakeLists.txt under |
| 2017-04-01 01:30:45 -0600 | asked a question | how can I find some information related to contributing opencv_contrib Well, I want to implement a new algorithm for So is anyone can help me? Thank you. |
| 2017-03-25 10:41:54 -0600 | asked a question | OpenCV Code Style I am reading the source code of OpenCV under the guidance from The OpenCV Coding Style Guide. It says that the implementation is put to |
| 2017-02-27 06:48:26 -0600 | commented answer | analysis of the vertical and horizontal histogram how can that show the intensity differences between successive rows by performing histogram calculation on rows or colums? |
| 2016-06-05 08:09:17 -0600 | commented question | unable to read image using opencv-2.4.13 Do you get the right filename? plz check it. |
| 2016-06-05 08:04:44 -0600 | received badge | ● Critic (source) |
| 2016-05-27 06:31:38 -0600 | commented question | Assertion failed i < 0, in calibrateCamera() how did you solve this problem? |
| 2016-05-17 09:07:39 -0600 | received badge | ● Supporter (source) |
| 2016-05-17 08:58:22 -0600 | asked a question | how can I find the mathematical principal of the opencv function stereoRectify() I know how to use the function |
| 2016-04-22 03:11:28 -0600 | commented question | something weird about `findChessboardCorners()` I changed the variables type to |
| 2016-04-22 03:03:23 -0600 | commented question | something weird about `findChessboardCorners()` I initialize boardSize as follow, and I set the stop point at the line |
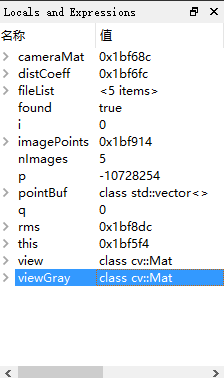
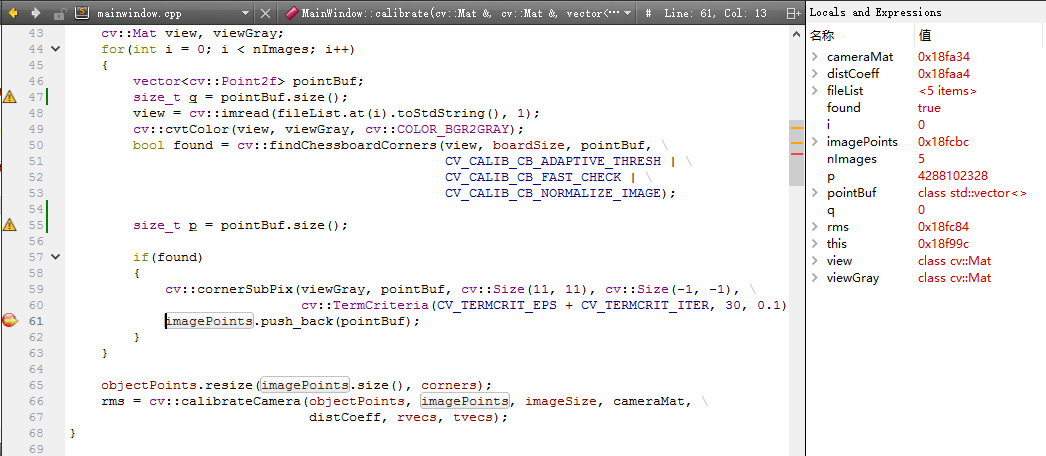
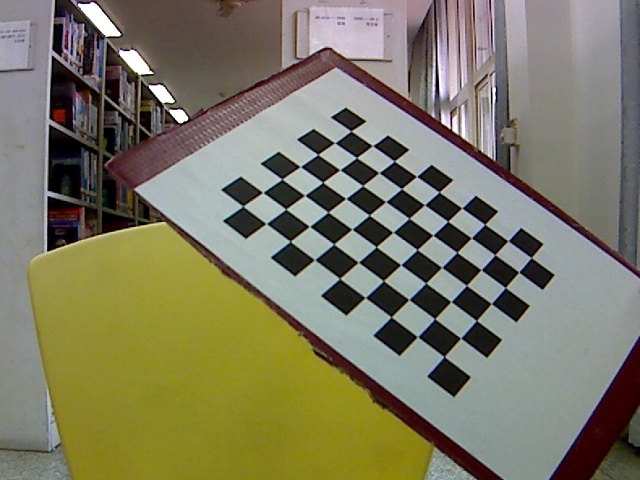
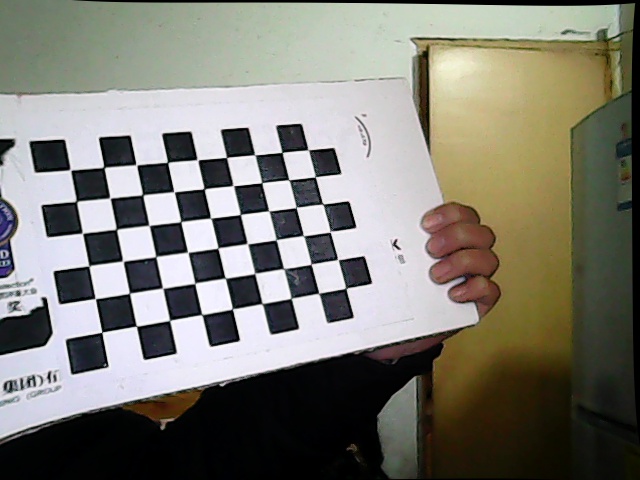
| 2016-04-21 23:13:20 -0600 | asked a question | something weird about `findChessboardCorners()` these days I was re-writing my opencv code on qt framework. the code runs well on the virtual studio 2013, but when I run it on the qt, something weird happened. the code is as follow I set two variables my debegger infomation is as follow,
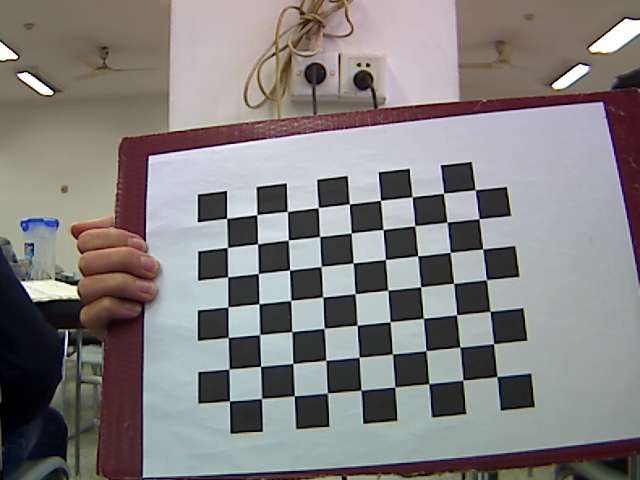
and the image for calibration is as follow,
update:
I set the debugger point at
|
| 2016-03-31 22:33:48 -0600 | commented question | can't modify the pixel value what's kind of your image? I think you should try |
| 2016-03-31 07:17:55 -0600 | commented question | can't modify the pixel value I dont think so. He added another code |
| 2016-03-29 21:16:39 -0600 | commented question | can't modify the pixel value I am very curious about what you say. could you show us your code more. |
| 2016-03-28 23:27:41 -0600 | commented question | accuracy of *stereoCalibrate()* I am so sorry I didn't give out some useful informations, now I have updated some codes and images. |
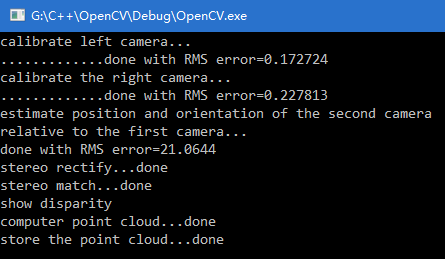
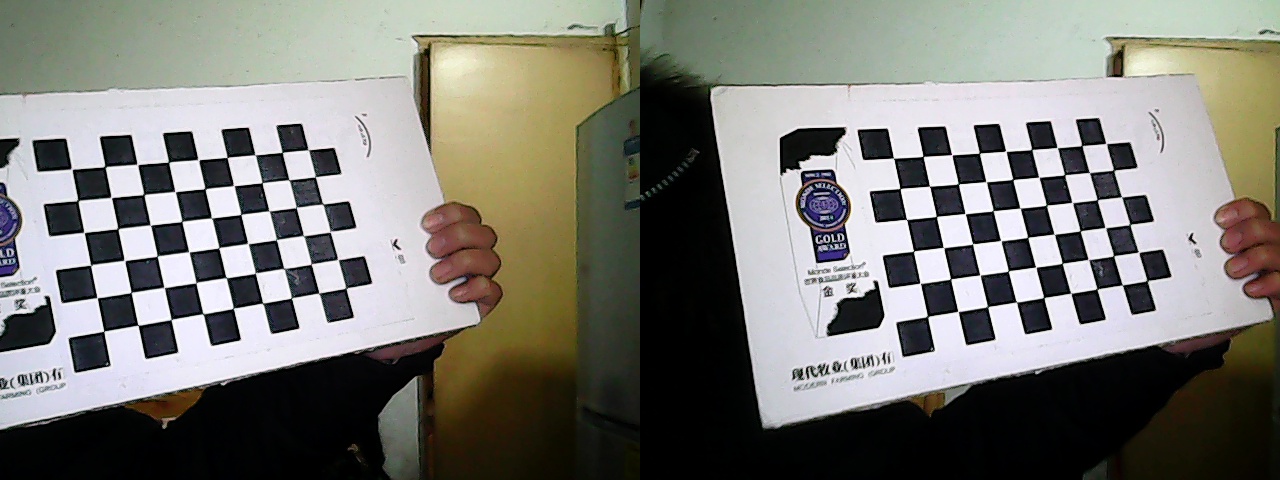
| 2016-03-28 22:32:50 -0600 | asked a question | accuracy of *stereoCalibrate()* Hi , I wanna get some advices here to improve the accuracy of stereocalibrate(). I calibrate my cameras very succesfuly , with rms <0.3 , but when I use the same images to do stereocalibrate, I get a very large rms. my result of my experiment is as follow.
so is there someone can give me some tips to improve my stereo calibration's result. thx ->..<- Updata:
I run and calibrate each camera like this, and those are parts of my images used for calibrating.
update 2: I grab the images for calibrating the two cameras at the same time. So dose the images used for stereo calibrations. |
| 2016-03-18 09:49:31 -0600 | commented answer | what's the coordinate relations between disparity image and the rectified images(the left or right view). thx. I campared the two images. it seems that you are right. |
| 2016-03-18 09:47:46 -0600 | commented answer | Camera calibration distorted output I am so sorry, I don't know any other better solutions yet. |
| 2016-03-17 04:06:54 -0600 | answered a question | Camera calibration distorted output this is because your cameras have strong radial distortion.look at this question Undistortion at far edges of image good luck. |
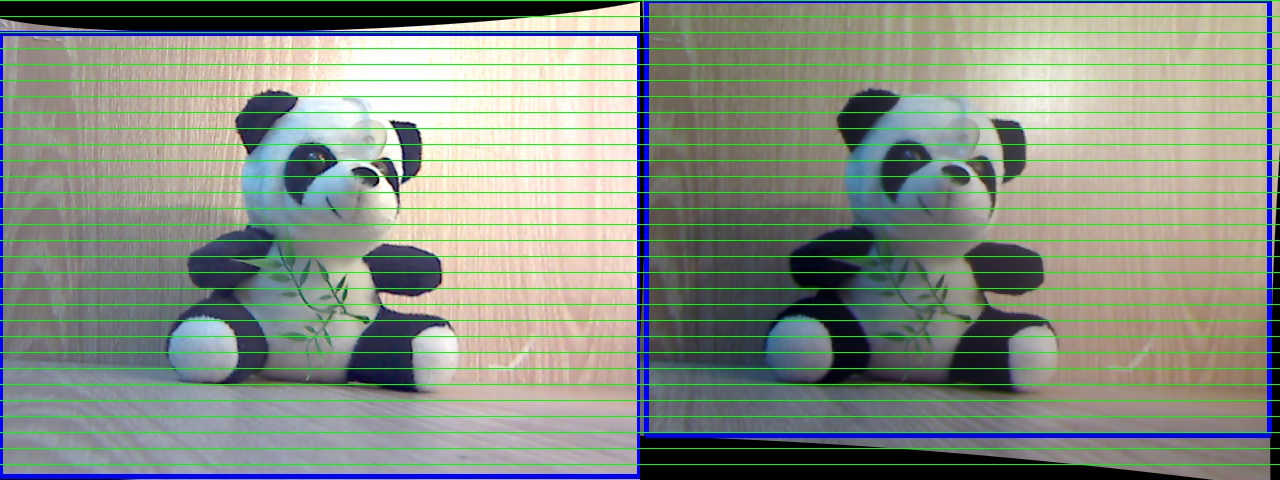
| 2016-03-16 08:54:23 -0600 | asked a question | what's the coordinate relations between disparity image and the rectified images(the left or right view). what's the coordinate relations between disparity image and the rectified images(the left or right view)? I use the following block-matching functions,and the parametes are as follow. And I get a diaparity image successfuly
And the stereo rectification result is as follow
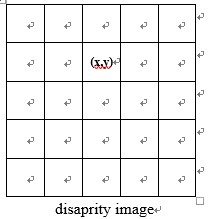
I want to re-construction the 3d surface. But which pixel in the original images corresponds to the disparity values whose coordinates are (x,y)? to express my question clearly, let me say something more about it. if I get a disparity value whose corrdinates are(x,y)(I uploaded a simple illustration to express this intuitively), how can I find the corresponding pixel in the stereo rectified images(the left or the right).
|
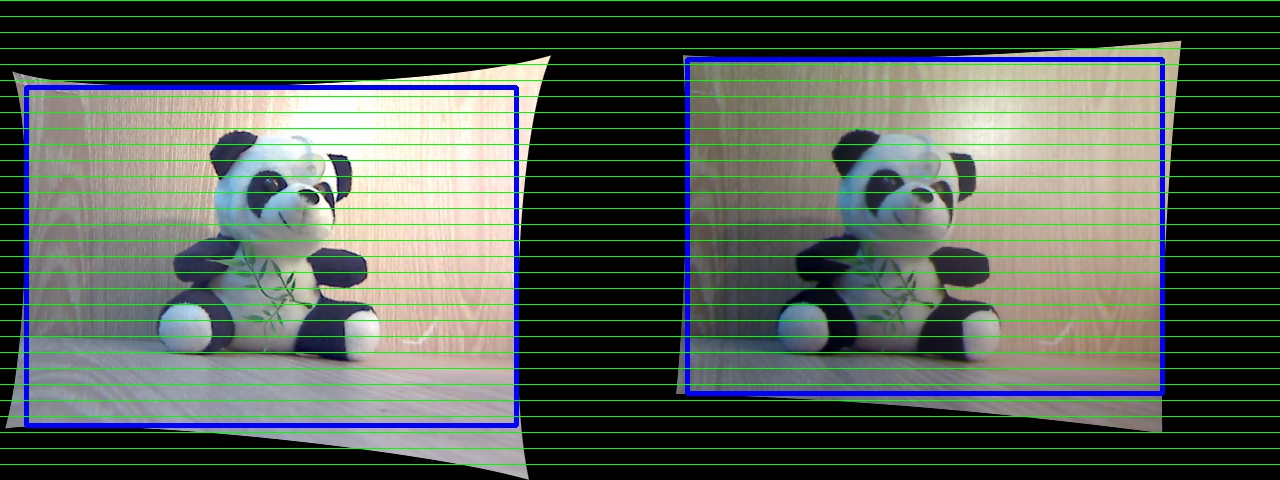
| 2016-03-15 23:42:54 -0600 | asked a question | what's the theoretical foundation of the function stereoRectify() I ran the function and the original left image is as follows
It seems that the image was scaled comparing to the original one. I want to know why and how. But I cant find any information on the internet. I have a Chinese book translated from Learning OpenCV, but it dont have detailed explanation on this section. So what I want know is where there is a detailed explanation? |
| 2016-01-31 12:51:20 -0600 | received badge | ● Teacher (source) |
| 2016-01-31 02:42:25 -0600 | received badge | ● Necromancer (source) |
| 2016-01-30 10:02:13 -0600 | received badge | ● Editor (source) |
| 2016-01-30 09:42:07 -0600 | answered a question | How to verify the correctness of calibration of a webcam Well,well,well. I am also a totally new to camera calibration techniques.But I still hope my words can help you.
|
| 2016-01-29 03:38:10 -0600 | commented question | Kinect one stereo calibration and overlay rgb with depth map So ,can you sure that the very large |
| 2016-01-29 01:47:24 -0600 | received badge | ● Enthusiast |
| 2016-01-27 03:09:34 -0600 | marked best answer | what kind of reason will lead to this kind of stereorectify result After calibrate my webcams successfully, I want to stereo rectify views from the two webcams captured at the same time.But the result seems not to be very successful. This is the views before stereo rectify:
And this is undistorted result of the left view(without stereo rectify)
And then ,this is my stereo rectify result:
And this is part of my code: so what's reason??? |