This forum is disabled, please visit https://forum.opencv.org
| 2016-01-05 05:24:24 -0600 | commented question | Kalman filter with Haar face detection This is the error
in this lines: |
| 2016-01-05 05:19:58 -0600 | commented question | Kalman filter with Haar face detection Can you check the code now |
| 2016-01-05 04:53:43 -0600 | commented question | Kalman filter with Haar face detection Thank you for answering, I'm trying to track the face with Kalman, and to be honest till now I didn't understand how. I read the tracking the mouse example and tried to implement it on the face but once I uncomment these lines I have an error (now I'm just trying to track the face with Kalman). Thank you |
| 2016-01-05 04:30:08 -0600 | received badge | ● Editor (source) |
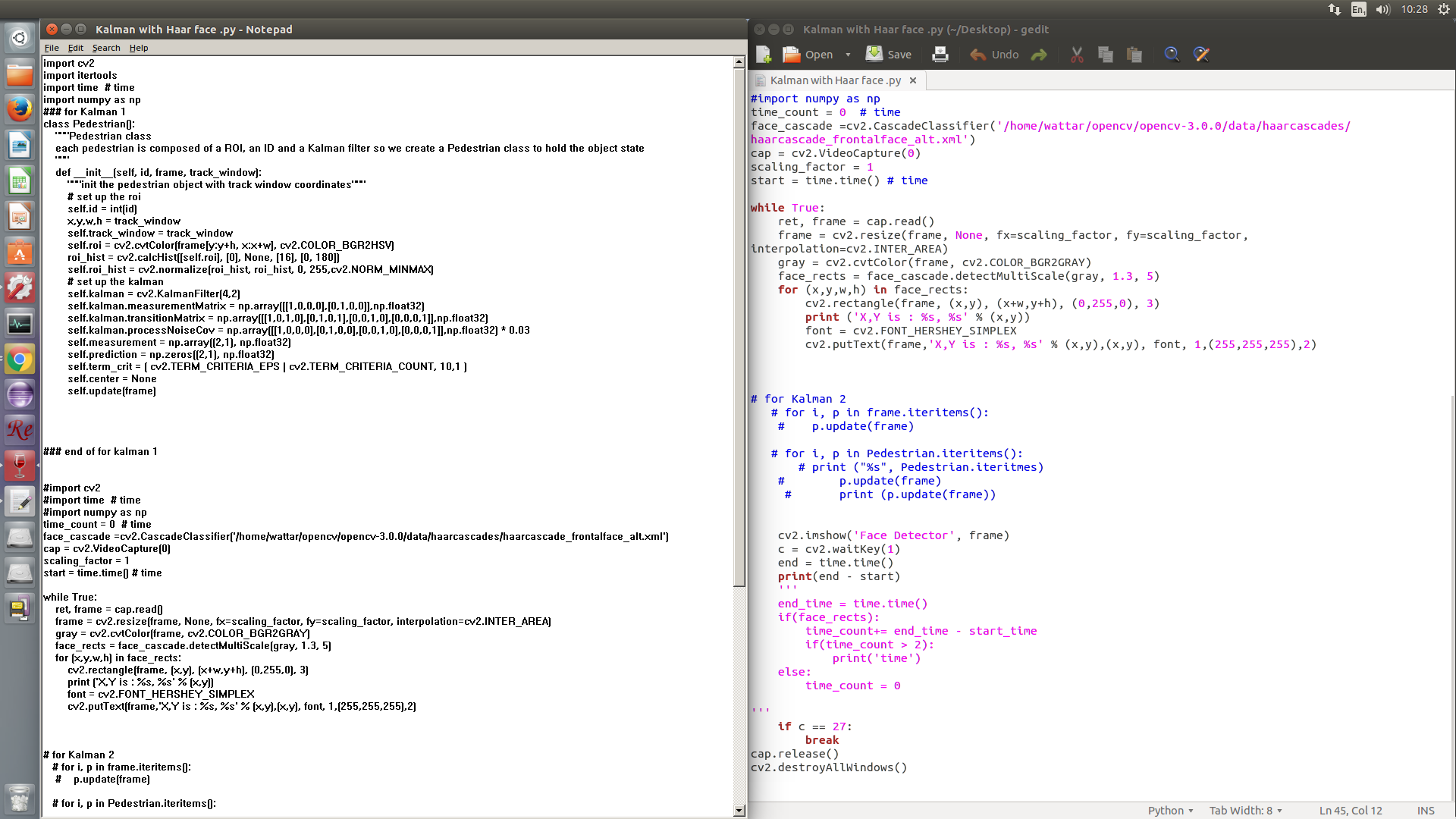
| 2016-01-05 03:58:07 -0600 | asked a question | Kalman filter with Haar face detection Hi, I'm a beginner in OpenCV and python, and I'm trying to use Kalman with Haar cascade face detection, in addition to showing the location and the time, I managed to show the location and time with the face detection, but when I tried to use Kalman I had this problem (AttributeError) and some time different problem, now I comment the code (I couldnt mange to run Kalman therefore its commented now # for Kalman 2), could anyone help in this??? Thank you ... The code is attached C:\fakepath\Kalman with face.png |
{kind=link}