Hello. I am trying to compute point cloud from two cameras.
- Find chessboard corners using findChessboardCorners
- Calibrate cameras using stereoCalibrate
- Calculate rectify matrix using stereoRectify
- Calculate remap maps using initUndistortRectifyMap
- Remap images
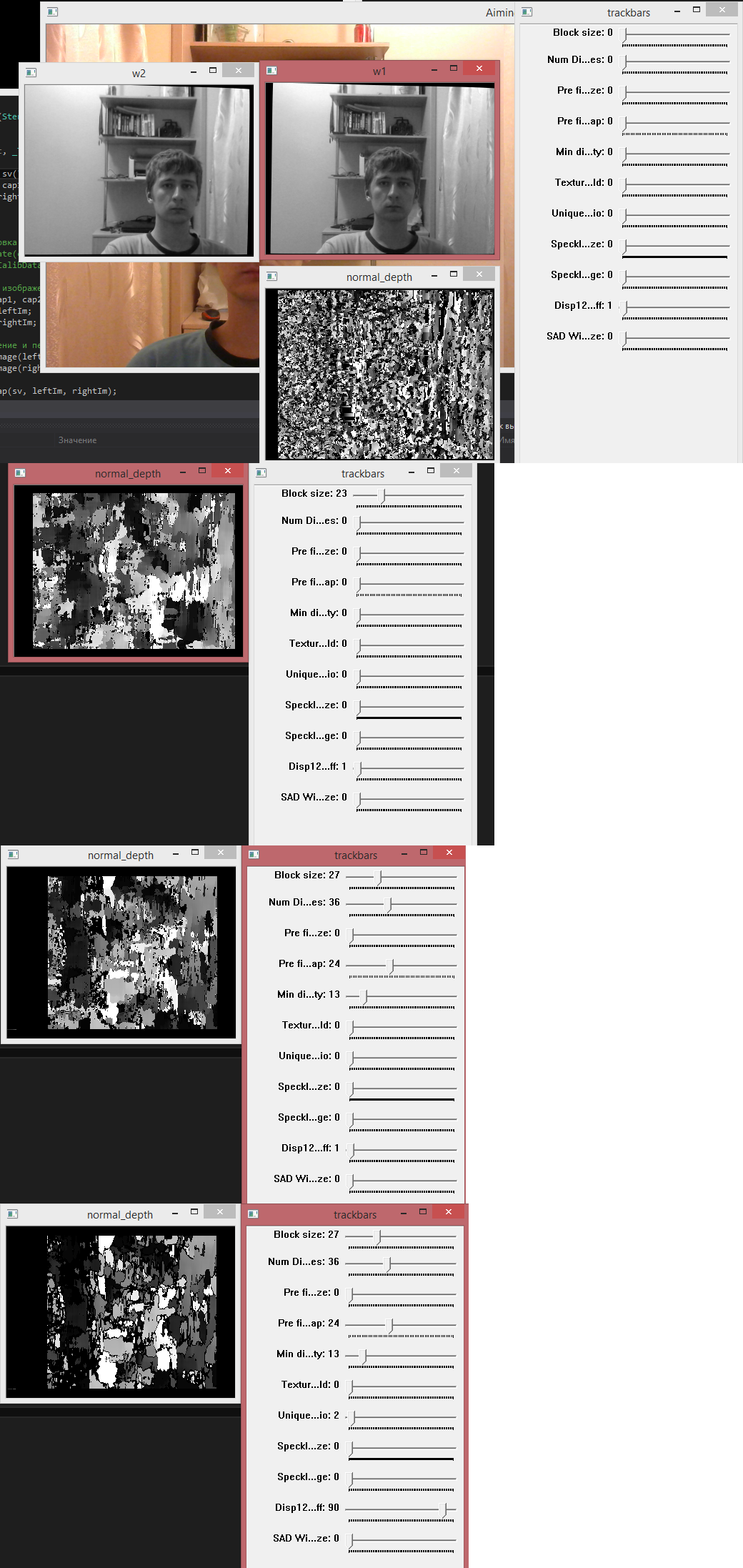
And I got a very bad results:

It's not so bad like this:

Is the any way to fix it?
This is my code (also available on GitHub):
// left - vector of grayscale images from left camera
// right - vector of grayscale images from right camera
// patternSize - number of chessboard corners
StereoCalibData StereoVision::Calibrate(const std::vector<cv::mat>& left, const std::vector<cv::mat>& right, cv::Size patternSize)
{
cv::Size imSize;
// Images points
std::vector<cv::Point2f> imagePointsLeftSingle, imagePointsRightSingle;
std::vector<std::vector<cv::Point2f>> imagePointsLeft, imagePointsRight;
// Object points
std::vector<cv::Point3f> objectPointsSingle;
std::vector<std::vector<cv::Point3f>> objectPoints;
//stereoCalibrate output
cv::Mat CM1(3, 3, CV_64FC1), CM2(3, 3, CV_64FC1); //Camera matrix
cv::Mat D1, D2; //Distortion
cv::Mat R, //Rotation matrix
T, //Translation matrix
E, //Существенная матрица
F; //Фундаментальная матрица
//stereoRectify output
cv::Mat R1, R2, P1, P2;
cv::Mat Q;
//1. --------------------------- Find chessboard corners ---------------------------------------------------------------
for (int i = 0; i < left.size(); i++)
{
//Finding chessboard corners
bool isFoundLeft = cv::findChessboardCorners(left[i], patternSize, imagePointsLeftSingle, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
bool isFoundRight = cv::findChessboardCorners(right[i], patternSize, imagePointsRightSingle, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
imSize = left[i].size();
cornerSubPix(left[i], imagePointsLeftSingle, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
cornerSubPix(right[i], imagePointsRightSingle, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
//Sometimes chessboard corners are found in bad direction (vertically lines), so I "rotate" them
_fixChessboardCorners(imagePointsLeftSingle, patternSize);
_fixChessboardCorners(imagePointsRightSingle, patternSize);
//Add to the corners vectors
imagePointsLeft.push_back(imagePointsLeftSingle);
imagePointsRight.push_back(imagePointsRightSingle);
}
//2. --------------------------- Compute object points ------------------------------------------------------------------
for (int j = 0; j<patternSize.height*patternSize.width; j++)
objectPointsSingle.push_back(cv::Point3f(j / patternSize.width, j%patternSize.width, 0.0f));
for (int i = 0; i < left.size(); i++)
objectPoints.push_back(objectPointsSingle);
//3. --------------------------- Stereo calibration --------------------------------------------------------------------------
stereoCalibrate(objectPoints, imagePointsLeft, imagePointsRight,
CM1, D1, CM2, D2, imSize, R, T, E, F, CV_CALIB_SAME_FOCAL_LENGTH | CV_CALIB_ZERO_TANGENT_DIST,
cvTermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS, 100, 1e-5));
cv::stereoRectify(CM1, D1, CM2, D2, imSize, R, T, R1, R2, P1, P2, Q);
// -------------------------- Saving rsults ------------------------------------------------------------------------
calibData.ImageSize = imSize;
calibData.LeftCameraMatrix = CM1.clone();
calibData.RightCameraMatrix = CM2.clone();
calibData.LeftCameraDistortions = D1.clone();
calibData.RightCameraDistortions = D2.clone();
calibData.LeftCameraRectifiedProjection = P1.clone();
calibData.RightCameraRectifiedProjection = P2.clone();
calibData.LeftCameraRot = R1.clone();
calibData.RightCameraRot = R2.clone();
calibData.Q = Q;
return calibData;
}
IPointCloudStorage* StereoVision::CalculatePointCloud(const cv::Mat& left, const cv::Mat& right) const
{
cv::Mat leftRemaped, rightRemaped;
cv::Mat depth, normalDepth;
cv::initUndistortRectifyMap(data.LeftCameraMatrix, data.LeftCameraDistortions, data.LeftCameraRot, data.LeftCameraRectifiedProjection, data.ImageSize, CV_32FC1, data.LeftMapX, data.LeftMapY);
cv::initUndistortRectifyMap(data.RightCameraMatrix, data.RightCameraDistortions, data.RightCameraRot, data.RightCameraRectifiedProjection, data.ImageSize, CV_32FC1, data.RightMapX, data.RightMapY);
cv::remap(left, leftRemaped, calibData.LeftMapX, calibData.LeftMapY, cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar());
cv::remap(right, rightRemaped, calibData.RightMapX, calibData.RightMapY, cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar());
cv::imshow("w1", leftRemaped);
cv::imshow("w2", rightRemaped);
return NULL;
}
P.S. There are some problems with syntax highlighting