This forum is disabled, please visit https://forum.opencv.org
| 2020-11-30 03:23:09 -0600 | received badge | ● Notable Question (source) |
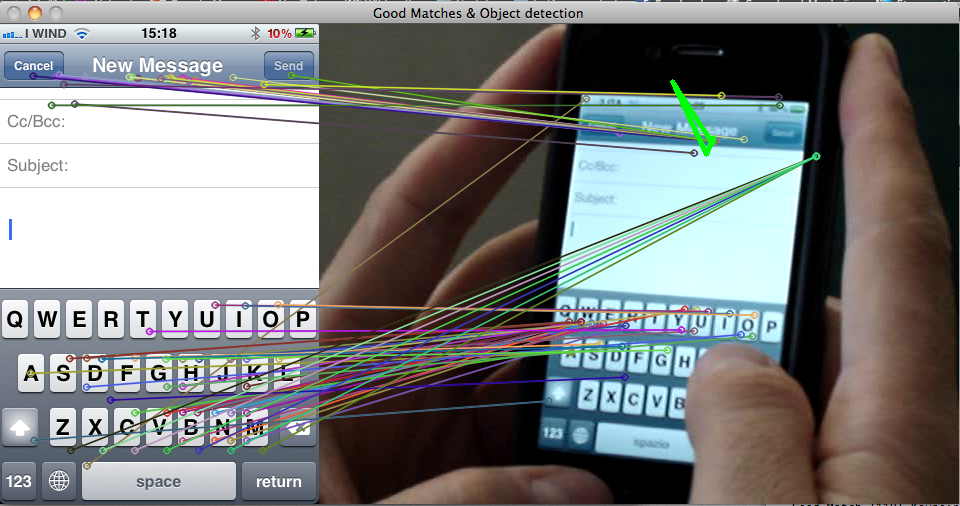
| 2020-11-30 01:04:20 -0600 | marked best answer | Object recognition by edge (or corners) matching ? Hello, I would like to develop, for academic purpouse, an object recognition system that uses (among other things) edges or corners matching. Basically I extract corner information on my model image then i try to find this object inside a query image using corner information. Do you have any hint? |
| 2020-11-15 01:31:00 -0600 | marked best answer | Removing selected rows from a Mat ? For some reasons I need to filter out rows of a Mat. (I need to filter out some descriptors of ORB) Which way do you suggest me? I haven't find any method to remove a single row from a Mat. So I was thinking I could iteratively inserting the good rows in a new Mat. C++ pseudocode: ? How would you erase a single row from a Mat after checking for some conditions (or adding only the selected row in a new Mat) ? |
| 2020-10-28 17:39:29 -0600 | received badge | ● Favorite Question (source) |
| 2020-10-23 14:42:47 -0600 | received badge | ● Good Question (source) |
| 2020-09-26 07:19:16 -0600 | received badge | ● Nice Question (source) |
| 2020-05-05 15:43:10 -0600 | received badge | ● Popular Question (source) |
| 2019-11-24 23:22:50 -0600 | received badge | ● Famous Question (source) |
| 2019-11-06 07:27:15 -0600 | received badge | ● Famous Question (source) |
| 2019-08-06 03:56:41 -0600 | received badge | ● Notable Question (source) |
| 2019-07-25 03:37:34 -0600 | received badge | ● Famous Question (source) |
| 2019-04-21 22:37:51 -0600 | received badge | ● Popular Question (source) |
| 2018-12-18 04:30:15 -0600 | received badge | ● Notable Question (source) |
| 2018-12-02 17:07:32 -0600 | received badge | ● Notable Question (source) |
| 2018-10-28 19:20:17 -0600 | received badge | ● Popular Question (source) |
| 2018-10-13 10:16:20 -0600 | marked best answer | Wait for a mouse click? I have a video. I would like to show the next frame only if the user clicks on a pixel on the current frame. (The user must select a point in each frame) Without using |
| 2018-09-22 17:12:09 -0600 | received badge | ● Good Answer (source) |
| 2018-08-30 10:55:52 -0600 | marked best answer | check ransac outlier before perspectiveTransform ? Hello guys, I would like to draw outliers found by ransac with the classic method: I saw in a snippet one can do something like: But I don't understand why we need to call |
| 2018-08-30 10:55:52 -0600 | received badge | ● Nice Answer (source) |
| 2018-07-13 09:01:20 -0600 | received badge | ● Nice Question (source) |
| 2018-07-12 14:40:37 -0600 | received badge | ● Notable Question (source) |
| 2018-05-01 15:54:36 -0600 | received badge | ● Notable Question (source) |
| 2018-03-05 04:19:37 -0600 | received badge | ● Famous Question (source) |
| 2018-01-23 16:55:05 -0600 | marked best answer | How to know if two Mat point to the same data? I have two Eventually in the code it could happen Is there any way to check whenever (Without drawing stuff on one image and showing the other) |
| 2017-11-29 17:55:56 -0600 | marked best answer | Check if homography is good Basically I a am using a function to check whatever the homography is good or not (I have taken it from BRIEF_demo). Can anyone explain why we check the determinant like that, is there any theory behind it? To understand what I am talking about, that function avoids homography like this:
Thanks |
| 2017-09-07 07:37:15 -0600 | received badge | ● Popular Question (source) |
| 2017-08-30 07:39:41 -0600 | received badge | ● Popular Question (source) |
| 2017-08-07 08:53:36 -0600 | received badge | ● Famous Question (source) |
| 2017-07-31 07:09:40 -0600 | marked best answer | Make a collage with other images I have a Then I have a bigger image (let's say
With variable numbers of cols. How would you do that? |
| 2017-07-19 08:09:12 -0600 | marked best answer | matchShapes() example Hello Guys, I would like to use matchShapes() function for finding an object inside a query image. Let's say I have a model image of a book, i want to extract its shape and then try to find this book (its shape) inside another image. I have googled a lot but couldn't find any real example on how to use matchShapes to achive this. The documentation lacks. Can someoen make a little example in C++ ? Thanks a lot! (Note I know I can use SIFT/ORB etc, but i want to use matchShapes()) |
| 2017-06-08 04:10:41 -0600 | received badge | ● Famous Question (source) |
| 2017-06-01 22:46:30 -0600 | received badge | ● Famous Question (source) |
| 2017-05-31 02:50:28 -0600 | received badge | ● Notable Question (source) |
| 2017-04-25 15:41:57 -0600 | received badge | ● Popular Question (source) |
| 2017-03-21 09:37:29 -0600 | received badge | ● Famous Question (source) |
| 2017-01-13 13:47:07 -0600 | received badge | ● Famous Question (source) |
| 2016-11-23 04:09:01 -0600 | marked best answer | calcOpticalFlowPyrLK doesn't respect window size? [bug ?] I am trying to use optical flow with opencv 2.4.5: I am using similar parameters to the demo of the opencv: But as you can see I have set the maxLevels to 0 (so it will process only the current layer). The problem is that this function sometimes returns a distance between points of over 100, if I do: This sometime prints: Meaning that y has a difference of over 120 pixels. Is that normal with a window size of only (6,6)? Note that this happens even if i give more layers in the pyramid. Note that this happens especially when a point gets occluded or goes out of the scene |
| 2016-10-28 00:27:57 -0600 | received badge | ● Popular Question (source) |
| 2016-10-15 07:47:31 -0600 | received badge | ● Popular Question (source) |
| 2016-09-19 04:23:44 -0600 | received badge | ● Notable Question (source) |
| 2016-08-18 01:53:39 -0600 | received badge | ● Notable Question (source) |
| 2016-08-12 05:59:09 -0600 | received badge | ● Notable Question (source) |
| 2016-06-21 01:56:37 -0600 | received badge | ● Popular Question (source) |
| 2016-06-02 20:48:33 -0600 | marked best answer | How to match 2 HOG for object detection? Basically I am implementing a system of object detection. I have already implemenet SIFT and ORB for detection. Now I would like to add HOG matching. I can extract HOG feature by doing: Now I would like to use this information to find a match in a query image containg the object, I don't want to use SVM. Any sample code? And if the SVM is the only way, how can I train it with my model image? (Sample code if you can thanks) I wonder why it is not possibile to match it like we were matching SIFT descriptor and then doing a sort of ratio test =/ |