This forum is disabled, please visit https://forum.opencv.org
| 2021-05-31 08:55:55 -0600 | received badge | ● Famous Question (source) |
| 2020-11-05 04:48:44 -0600 | received badge | ● Notable Question (source) |
| 2020-11-03 11:45:26 -0600 | edited question | Opencv aruco::detectMarkers function crashes on AMD processors, runs fine on Intel. Opencv function crashes on AMD processors, runs fine on Intel. As above, I have a function in my application that uses o |
| 2020-11-03 10:59:16 -0600 | edited question | Opencv aruco::detectMarkers function crashes on AMD processors, runs fine on Intel. Opencv function crashes on AMD processors, runs fine on Intel. As above, I have a function in my application that uses o |
| 2020-11-03 10:33:03 -0600 | asked a question | Opencv aruco::detectMarkers function crashes on AMD processors, runs fine on Intel. Opencv function crashes on AMD processors, runs fine on Intel. As above, I have a function in my application that uses o |
| 2020-10-18 06:50:45 -0600 | asked a question | Find point correspondences without features or descriptors? Find point correspondences without features or descriptors? I have a set of data that is as follows: std::vector<cv: |
| 2020-07-08 06:38:35 -0600 | received badge | ● Popular Question (source) |
| 2020-06-06 05:39:17 -0600 | asked a question | Video IO backends, ffmpeg vs Video IO backends, ffmpeg vs I am developing an application which will be sold commercially. It requires video file loa |
| 2020-05-01 22:39:32 -0600 | received badge | ● Popular Question (source) |
| 2020-04-07 17:10:26 -0600 | received badge | ● Notable Question (source) |
| 2020-04-05 11:46:38 -0600 | commented question | Using findHomography to create 'fake' intrinsics? Is this the correct approach? //test normailse points std::vector<cv::Point2f> outputUndistortedPoints; c |
| 2020-04-04 10:26:50 -0600 | commented question | Using findHomography to create 'fake' intrinsics? Hi, thank you for getting back to me. Can you please explain the second option for me? How do I compute the image coordi |
| 2020-04-04 08:29:12 -0600 | edited question | Using findHomography to create 'fake' intrinsics? Using findHomography to create 'fake' intrinsics? I have two images from very different cameras. cv::Mat CameraA is fr |
| 2020-04-04 05:44:24 -0600 | asked a question | Using findHomography to create 'fake' intrinsics? Using findHomography to create 'fake' intrinsics? I have two images from very different cameras. cv::Mat CameraA is fro |
| 2020-03-20 06:35:55 -0600 | received badge | ● Teacher (source) |
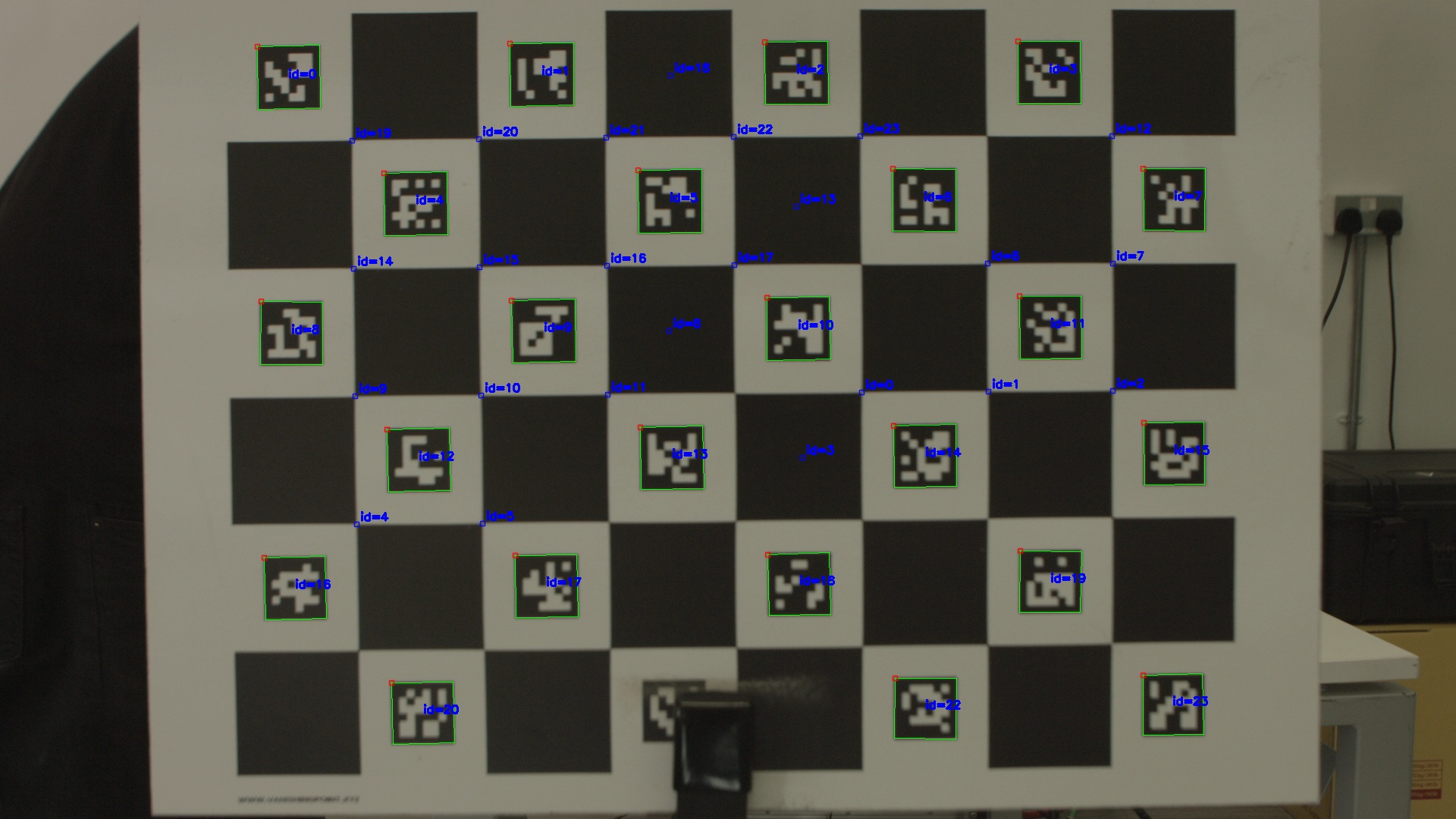
| 2020-03-20 06:17:35 -0600 | marked best answer | Detecting ChAruco board using example code, strange result. I am using the following code, pulled straight from the tutorials: instead of the expected corners, I get this result:
What is going wrong here? Why are my corners not aligned? I have tried other images, and i see the same thing. Thank you! |
| 2020-03-20 06:16:53 -0600 | received badge | ● Self-Learner (source) |
| 2020-03-20 05:53:37 -0600 | answered a question | Detecting ChAruco board using example code, strange result. Ah, as usual, user error. I was passing the number of squares in the format that findChessboard needs, using the inner |
| 2020-03-20 05:52:14 -0600 | commented question | Detecting ChAruco board using example code, strange result. Hi, thanks for your reply. As in the image above, the corner points are misaligned. However, I have just figured this ou |
| 2020-03-20 05:07:55 -0600 | asked a question | Detecting ChAruco board using example code, strange result. Detecting ChAruco board using example code, strange result. I am using the following code, pulled straight from the tuto |
| 2020-03-19 10:37:45 -0600 | asked a question | Detecting ChAruco board using example code, strange result. Detecting ChAruco board using example code, strange result. I am using the following code, pulled straight from the tuto |
| 2020-03-02 10:54:41 -0600 | received badge | ● Popular Question (source) |
| 2020-02-16 21:38:23 -0600 | received badge | ● Notable Question (source) |
| 2020-02-06 08:03:04 -0600 | answered a question | Return both solutions from solvePnp cv::SOLVEPNP_IPPE_SQUARE? Ah, this will do it. solvePnPGeneric instead of regular solvePnP. std::vector<cv::Vec3d> rvecsVec, tvecsVec; |
| 2020-02-06 07:41:24 -0600 | edited question | Return both solutions from solvePnp cv::SOLVEPNP_IPPE_SQUARE? Return both solutions from solvePnp cv::SOLVEPNP_IPPE_SQUARE? I have a PnP function that uses solvePnP with the cv::SOLV |
| 2020-02-06 07:37:30 -0600 | asked a question | Return both solutions from solvePnp cv::SOLVEPNP_IPPE_SQUARE? Return both solutions from solvePnp cv::SOLVEPNP_IPPE_SQUARE? I have a PnP function that uses solvePnP with the cv::SOLV |
| 2019-12-16 04:46:32 -0600 | commented question | Calculating depth with Ptr<StereoSGBM>, black bar on image Hi, thank you for your answers. I am successfully creating a point cloud, using this: float fx = 284.492615; float |
| 2019-12-12 05:35:38 -0600 | asked a question | Calculating depth with Ptr<StereoSGBM>, black bar on image Calculating depth with Ptr<stereosgbm>, black bar on image I have a calibrated fisheye stereo pair that I am using |
| 2019-12-08 21:29:00 -0600 | received badge | ● Self-Learner (source) |
| 2019-12-05 08:23:36 -0600 | answered a question | cv::fisheye::stereoRectify giving black image. Setting the cx and cy values manually to the real middle of the image size has helped me here. Creating the Projection |
| 2019-12-04 11:07:29 -0600 | edited question | cv::fisheye::stereoRectify giving black image. cv::fisheye::stereoRectify giving black image. I am trying to create a depth map from a fisheye stereo camera. I have in |
| 2019-12-04 10:52:18 -0600 | asked a question | cv::fisheye::stereoRectify giving black image. cv::fisheye::stereoRectify giving black image. I am trying to create a depth map from a fisheye stereo camera. I have in |
| 2019-11-28 11:02:21 -0600 | asked a question | Get 3d point from clicked depth map pixel? Get 3d point from clicked depth map pixel? I have a depth map, from the Zed stereo camera. I need a function that gives |
| 2019-10-29 05:09:29 -0600 | marked best answer | triangulate 3d points from a stereo camera and chessboard. Hi, I have a calibrated stereo camera, so i have the extrinsics, intrinsics and dist cooeffs. I have a chessboard, and using : I get the chessboard points. What i need to do now, is write a function that returns the 3d triangulated coordinates of those points, in relation to the camera. Is there a function existing that will do this for me? Should I use: Thank you! |
| 2019-10-29 04:50:59 -0600 | received badge | ● Notable Question (source) |
| 2019-09-30 08:25:59 -0600 | asked a question | test transform between two cameras with projectPoints? test transform between two cameras with projectPoints? I have a stereo calibrated camera pair, so i have known intrinsic |
| 2019-09-29 11:47:24 -0600 | marked best answer | cv::Mat imread to unsigned short*? I am trying to replace the following function with opencv: (from: https://github.com/stevenlovegrove/Pa...) This returns a where depth.ptr is I am trying to remove pangolin from this, and use opencv instead. So I load the same image: convert it to unsigned short: Then use the pointer to the data to pass to the function: The problem is, I see a very different result when I use this method. Where am i going wrong here? How can I replicate the pangolin function with openCv? thank you. |
| 2019-09-07 07:34:17 -0600 | received badge | ● Notable Question (source) |
| 2019-08-28 01:42:16 -0600 | received badge | ● Popular Question (source) |
| 2019-08-21 12:28:56 -0600 | commented question | Calculate extrinsics between two cameras using FindHomography? Hi, using new images did indeed help, but I ended up going with a stereo calibration type approach, adding bundle adjust |
| 2019-08-16 06:45:54 -0600 | commented question | Calculate extrinsics between two cameras using FindHomography? Thank you! I cannot sync them, it's true. I will try to use a static chessboard, and adjust the focus / lighting conditi |
| 2019-08-14 10:03:11 -0600 | edited question | Calculate extrinsics between two cameras using FindHomography? Calculate extrinsics between two cameras using FindHomography? I have two cameras with different lenses and resolutions. |
| 2019-08-14 10:02:35 -0600 | commented question | Calculate extrinsics between two cameras using FindHomography? Hi, I just noticed an error in the code I uploaded, the read should be: cv::Mat frame1_2 = cv::imread("frames/frame |
| 2019-08-14 07:24:23 -0600 | commented question | Calculate extrinsics between two cameras using FindHomography? Sure, you can grab the intrinsics and frames here: https://drive.google.com/file/d/1GJo_D4MTiAKlYU3kQduHIbhG2klg1j_S/vi |
| 2019-08-14 07:23:28 -0600 | edited question | Calculate extrinsics between two cameras using FindHomography? Calculate extrinsics between two cameras using FindHomography? I have two cameras with different lenses and resolutions. |
| 2019-08-14 07:07:40 -0600 | edited question | Calculate extrinsics between two cameras using FindHomography? Calculate extrinsics between two cameras using FindHomography? I have two cameras with different lenses and resolutions. |
| 2019-08-14 06:37:45 -0600 | edited question | Calculate extrinsics between two cameras using FindHomography? Calculate extrinsics between two cameras using FindHomography? I have two cameras with different lenses and resolutions. |