This forum is disabled, please visit https://forum.opencv.org
| 2020-01-06 19:26:58 -0600 | received badge | ● Notable Question (source) |
| 2018-04-23 11:18:24 -0600 | received badge | ● Popular Question (source) |
| 2015-05-05 16:26:17 -0600 | received badge | ● Student (source) |
| 2015-01-22 05:22:07 -0600 | received badge | ● Editor (source) |
| 2015-01-22 05:17:28 -0600 | commented answer | Stereo rectification is not row aligned I checked the cv::stereoRectify again, with a generic camera calibration matrix [2600, 0, 1280 0, 2600, 960 0, 0, 1] and the distortion parameters found by calibration. Now it's almost perfectly aligned. So my camera calibration was wrong ... |
| 2015-01-22 03:14:55 -0600 | received badge | ● Self-Learner (source) |
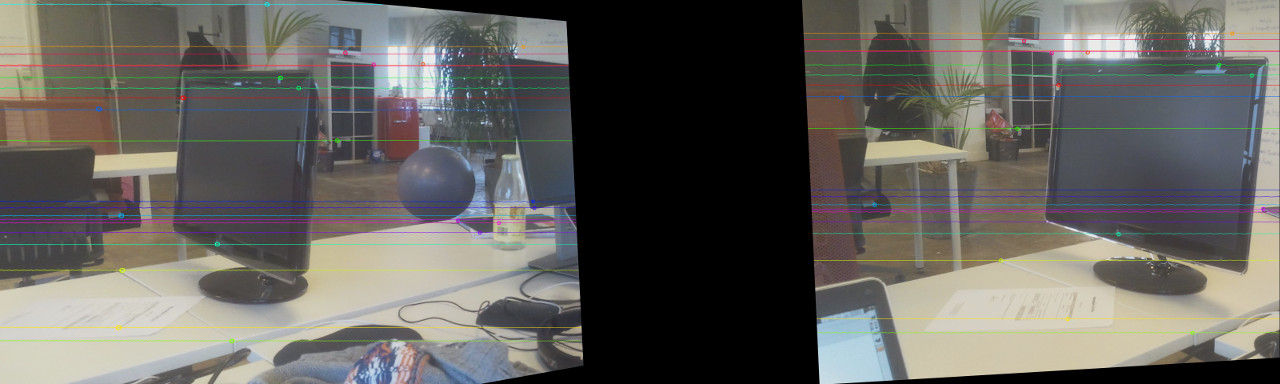
| 2015-01-22 03:14:13 -0600 | answered a question | Stereo rectification is not row aligned I implemented a stereo rectification algorithm based on "A compact algorithm for rectification of stereo pairs" by Fusiello et al. It works quite well for my use case. But I found out what I did wrong: check the camera calibration matrix! I checked the cv::stereoRectify again, with a generic camera calibration matrix [2600, 0, 1280 0, 2600, 960 0, 0, 1] and the distortion parameters found by calibration. Now I get this result:
|
| 2015-01-12 03:39:49 -0600 | received badge | ● Scholar (source) |
| 2015-01-09 05:08:50 -0600 | commented question | Stereo rectification is not row aligned thank you! I already thought I made some mistakes. Can you post your comment as an answer, so that I can accept it? |
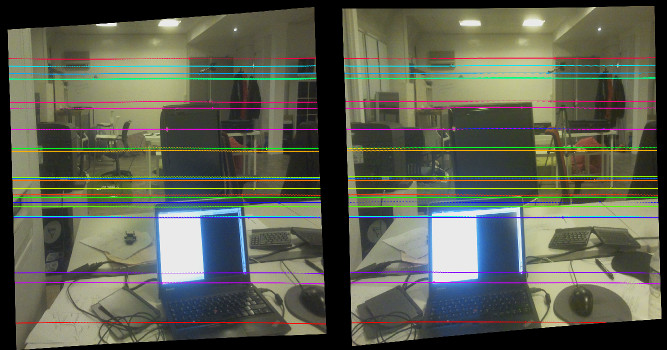
| 2015-01-08 11:03:24 -0600 | asked a question | Stereo rectification is not row aligned I try to rectify two images taken with a Samsung Galaxy S to calculate a depth map. They seem to be correctly rectified, but they are not row aligned, that is the drawn epipolar lines are horizontal, but have different y-values. I rectify the images with stereoRectify(), call initUndistortRectifyMap/remap to rectify the two images. The rotation/translation is calculated with the fundamental matrix (using manually specified correspondences). It is converted to the essential matrix using intrinsic parameters. Then rotation/translation can be calculated using the formulas specified in Hartley&Zisserman's Multiple View Geometry, "9.6.2 Extraction of cameras from the essential matrix", p. 258 Question: Can you give me a hint to align the rows? In the few tutorials/examples that I found, the images are row-aligned after stereoRectify/initUndistortRectifyMap/remap I calibrated the camera using a 6x8 checkerboard pattern. The colored lines represent the epipolar lines
If you want to rectify the images by yourself: Here the intrinsic and extrinsic parameters. Here the original images for comparison: screen0.jpg screen1.jpg |
{kind=link}
{kind=link}