This forum is disabled, please visit https://forum.opencv.org
| 2020-07-01 22:44:19 -0600 | asked a question | My saved video run in very fast for higher resolution? My saved video run in very fast for higher resolution? I saved video with 640x480 resolution and played with windows med |
| 2020-07-01 22:44:15 -0600 | asked a question | My saved video run in very fast for higher resolution? My saved video run in very fast for higher resolution? I saved video with 640x480 resolution and played with windows med |
| 2020-07-01 21:19:01 -0600 | edited question | How can I display supported video format in opencv python? How can I display supported video format in opencv python? I want to see supported video format of my webcam. How can I |
| 2020-07-01 21:18:07 -0600 | asked a question | How can I display supported video format in opencv python? How can I display supported video format in opencv python? I want to see supported video format of my webcam. How can I |
| 2020-07-01 21:18:05 -0600 | asked a question | How can I display supported video format in opencv python? How can I display supported video format in opencv python? I want to see supported video format of my webcam. How can I |
| 2020-03-30 05:13:38 -0600 | received badge | ● Popular Question (source) |
| 2019-12-19 03:15:42 -0600 | edited question | How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? I want to convert keras mod |
| 2019-12-19 03:15:41 -0600 | edited question | How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? I want to convert keras mod |
| 2019-12-19 03:15:05 -0600 | asked a question | How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? How can I convert keras model (.h5) into tensorflow (.pb) model to use in opencv DNN module? I want to convert keras mod |
| 2019-11-25 02:34:24 -0600 | received badge | ● Student (source) |
| 2019-11-25 01:21:58 -0600 | asked a question | How can I define "scopesToKeep" and "scopesToIgnore" nodes of a frozen model? How can I define "scopesToKeep" and "scopesToIgnore" nodes of a frozen model? I run successfully the following files fo |
| 2019-07-25 01:27:15 -0600 | asked a question | Error in loading .pb file from readNetFromTensorflow? Error in loading .pb file from readNetFromTensorflow? I have created .pb file from keras .h5 file. when I am using this |
| 2017-09-19 05:33:55 -0600 | commented answer | How can I connect Kinect in opencv? @Ziri Thank you very much for your reply. Yes I know that. I already install openni and Nite. But when I am going to bui |
| 2017-09-19 05:29:33 -0600 | received badge | ● Enthusiast |
| 2017-09-18 10:14:52 -0600 | received badge | ● Supporter (source) |
| 2017-09-18 08:12:35 -0600 | asked a question | How can I connect Kinect in opencv? How can I connect Kinect in opencv? I want to connect kinect in opencv using openni. Please give some latest instruction |
| 2017-09-17 06:34:13 -0600 | edited question | Using Kinect and other OpenNI compatible depth sensors? Using Kinect and other OpenNI compatible depth sensors? I am going to connect Kinect and want to run the code "openni_c |
| 2017-09-17 06:33:37 -0600 | asked a question | Using Kinect and other OpenNI compatible depth sensors? Using Kinect and other OpenNI compatible depth sensors? I am going to connect Kinect and want to run the code "openni_c |
| 2017-09-10 05:20:26 -0600 | commented answer | Transform world coordinate to Camera Coordinate using SolvePNP? Thanks to all. @ Tetragramm you are right. It is OK now. |
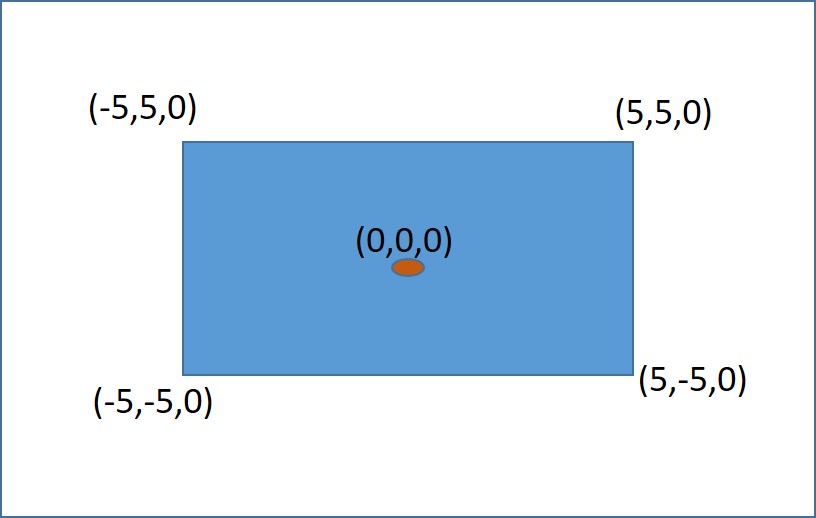
| 2017-09-10 05:19:10 -0600 | marked best answer | Transform world coordinate to Camera Coordinate using SolvePNP? I estimate rvec and tvec using solvePNP . How can I convert the (0,0,0) point from world coordinate to the camera coordinate using rvec and tvec? Our model points is shown below:
|
| 2017-09-10 05:19:10 -0600 | received badge | ● Scholar (source) |
| 2017-09-06 19:24:59 -0600 | commented answer | Transform world coordinate to Camera Coordinate using SolvePNP? Thanks. In the above figure, I have shown an image. the image contains a rectangular object. The model points are also s |
| 2017-09-06 19:24:27 -0600 | commented answer | Transform world coordinate to Camera Coordinate using SolvePNP? Thanks. In the above figure, I have shown an image. the image contains a rectangular object. The model points are also s |
| 2017-09-05 21:45:13 -0600 | commented answer | Transform world coordinate to Camera Coordinate using SolvePNP? Thank you very much for your answer. Would you clear me, please? After inverting we have to create transformation matrix |
| 2017-09-05 03:48:32 -0600 | asked a question | Transform world coordinate to Camera Coordinate using SolvePNP? Transform world coordinate to Camera Coordinate using SolvePNP? I estimate rvec and tvec using solvePNP . How can I conv |
| 2017-07-25 05:33:56 -0600 | received badge | ● Editor (source) |
| 2017-07-25 05:33:12 -0600 | asked a question | How can I access each elements of an one contour? i am new in OpenCV. I have the following problem. suppose I retrieved a contour from image. It is look like this: square[0] and the size of square[0] is [1×4]. suppose the elements are look like this: [2,3;4,5;6,7;1,2] How can I access each element. As for example How can I retrieve only 2? |
| 2017-07-21 10:15:29 -0600 | asked a question | Where can I get the following library opencv_nonfree300.lib opencv_core300.lib opencv_legacy300.lib I installled differnt types of version but I can not find it. |
| 2017-05-14 10:23:53 -0600 | commented question | What is chessboard model points? Thanks for your answer |
| 2017-05-14 10:23:52 -0600 | commented answer | Can i get 2d world coordinates from a single image ([u,v] coords)? What is the chessboard model points (model coordinates) |
| 2017-05-14 09:40:18 -0600 | asked a question | What is chessboard model points? As for example: /Transform model point (in object frame) to the camera frame cv::Point3f pt0 = transformPoint(modelPts[0], rvec, tvec); cv::Point3f pt1 = transformPoint(modelPts[8], rvec, tvec); cv::Point3f pt2 = transformPoint(modelPts[53], rvec, tvec); |
| 2017-05-14 08:39:40 -0600 | asked a question | Real world coordinate from pixel coordinate? I have the intrinsic and extrinsic parameter of my calibrated camera. Now I want to convert from pixel coordinate to the world coordinate. The camera is placed at height of 145 cm from the floor and it is looking on the floor. I write a simple code but it does not give the accurate result: %%%%%setting some parameters a=0;b=0;c=1;d=0; %%%Intrinsic Parameter %---- Focal length: fc = [320.269142010037630 ; 319.966530766203500]; f=mean(fc); clc; %----- Principal point: cc = [182.596545116467270 ; 115.011524736116240]; %-- Skew coefficient: alpha_c = 0.000000000000000; % Extrinsic parameters: % Translation vector: T= [ -113.538953; 593.803124; 1493.638755 ]; % Rotation vector: % Rotation matrix: %%%Projecttion center as it inv(R)==R'; Oc=R'*T; xi=10; yi=120; %%% pixel coordinates ximc=(xi-cc(1))/fc(1); yimc=(yi-cc(2))/fc(2); zimc=f; Ow=R'*([ximc;yimc;zimc]-T); Ow %%%% Finding intersection point between a line in 3D and a Plane Owapp(1)=Oc(1)+ (((d-(aOc(1)+bOc(2)+cOc(3)))(Ow(1)-Oc(1)))/(a(Ow(1)-Oc(1))+b(Ow(2)-Oc(2))+c(Ow(3)-Oc(3)))); Owapp(2)=Oc(2)+ (((d-(aOc(1)+bOc(2)+cOc(3)))(Ow(2)-Oc(2)))/(a(Ow(1)-Oc(1))+b(Ow(2)-Oc(2))+c(Ow(3)-Oc(3)))); Owapp(3)=Oc(3)+ (((d-(aOc(1)+bOc(2)+cOc(3)))(Ow(3)-Oc(3)))/(a(Ow(1)-Oc(1))+b(Ow(2)-Oc(2))+c*(Ow(3)-Oc(3)))); % % % % Owapp(1)=Oc(1) - (((aOc(1)+bOc(2)+cOc(3)+d)(Ow(1)-Oc(1)))/((a(Ow(1)-Oc(1)))+ (b(Ow(2)-Oc(2)))+ (c(Ow(3)-Oc(3))))); % % % % Owapp(2)=Oc(2) - (((aOc(1)+bOc(2)+cOc(3)+d)(Ow(2)-Oc(2)))/((a(Ow(1)-Oc(1)))+ (b(Ow(2)-Oc(2)))+ (c(Ow(3)-Oc(3))))); % % % % Owapp(3)=Oc(3) - (((aOc(1)+bOc(2)+cOc(3)+d)(Ow(3)-Oc(3)))/((a(Ow(1)-Oc(1)))+ (b(Ow(2)-Oc(2)))+ (c*(Ow(3)-Oc(3))))); Owapp |