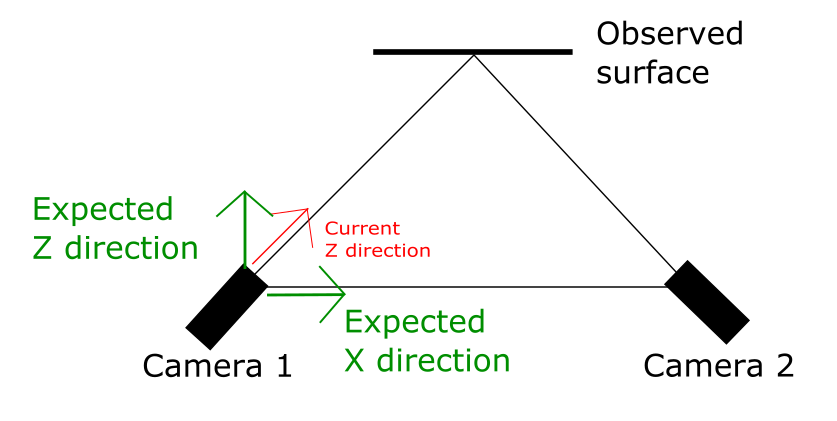
I m using a stereo system and so i m trying to get world coordinates of some points. I can do it with specific calibration for each camera and then i calculate rotation matrix and translation vector. And finally i triangulate but i m not sure of the origin of the world coordinates.
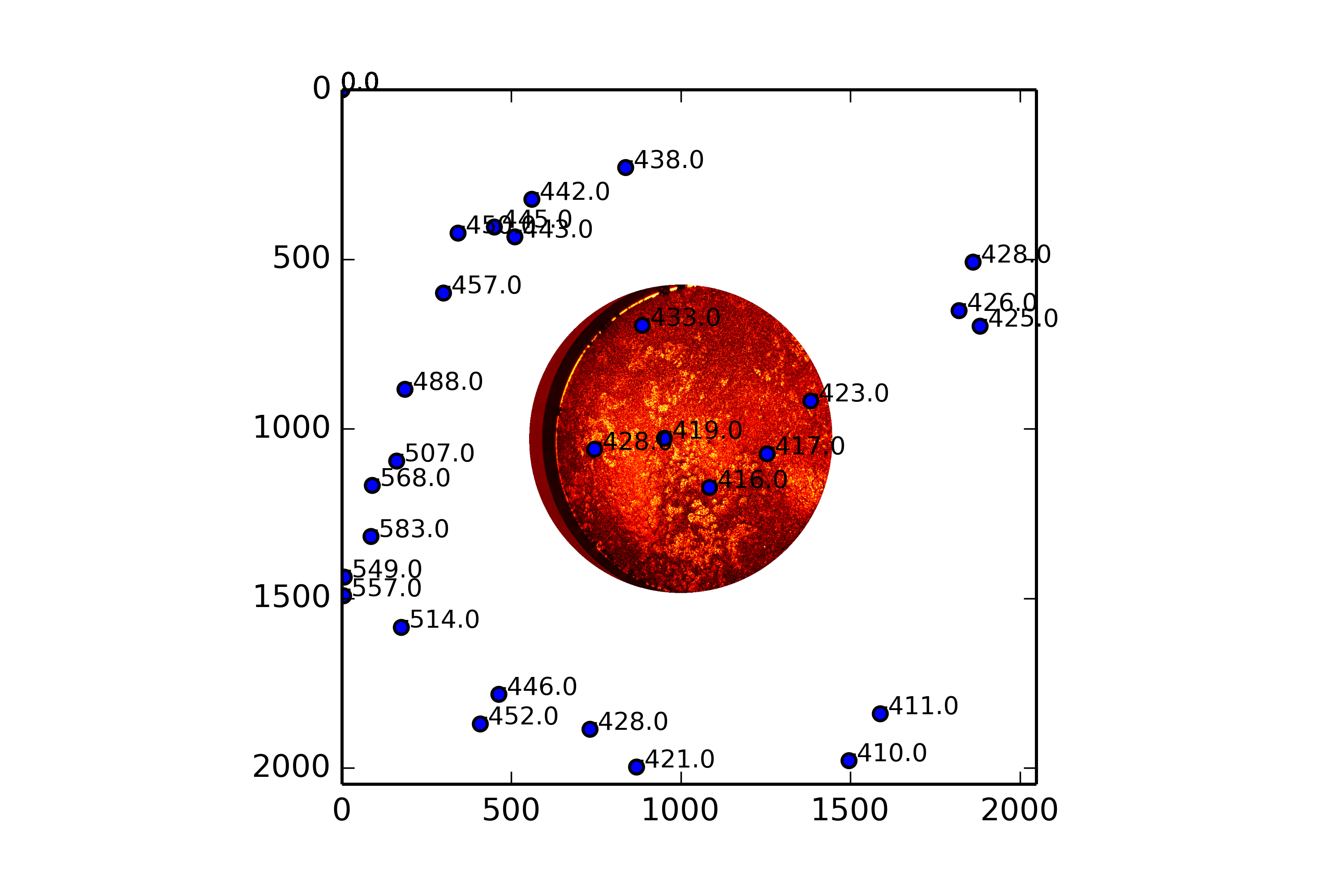
As you can see on my figure, values correspond to depth value but they shoud be close of 400. So i suppose that the origin is the left camera that s why it variates...
A piece of my code with my projective arrays and triangulate function :
#C1 and C2 are the cameras matrix (left and rig)
#R_0 and T_0 are the transformation between cameras
#Coord1 and Coord2 are the correspondant coordinates of left and right respectively
P1 = np.dot(C1,np.hstack((np.identity(3),np.zeros((3,1)))))
P2 =np.dot(C2,np.hstack(((R_0),T_0)))
for i in range(Coord1.shape[0])
z = cv2.triangulatePoints(P1, P2, Coord1[i,],Coord2[i,])
Thanks for help ;)