
Well as the title says I would like to grab and process multiple frames in different threads by using a circular buffer or more, I hope that you can point me to what is better. For grabbing frames I am not using the VideoCapture() class from opencv but the libfreenect2 library and the corresponding listener since I am working with the Kinect one sensor which is not compatible with the VideoCapture() + openi2 functionality yet. My intention is to have one thread grabbing frames continuously in order not to affect the framerate that I can get from the kinect sensor, also here I might add a viewer in order to have a live monitor of what is happening (I do not know though how feasible is this and how it will affect the framerate) and having another thread where I would do all the process. From the libfreenect2 listener I can obtain multiple views regarding the sensor so at the same time I can have a frame for the rgb camera, one for the ir, one for the depth and with some process I can also obtain an rgbd. My question now is how to make shareable these frames to the two threads. Having a look in the following questions Time delay in VideoCapture opencv due to capture buffer and waitKey(1) timing issues causing frame rate slow down - fix? I think that a good approach would be to go with two threads an a circular buffer approach. However, what is more logical to have multiple circular buffers for each view or one circular buffer which will contain a container (e.g. an stl vector<>) with the frames from each view.
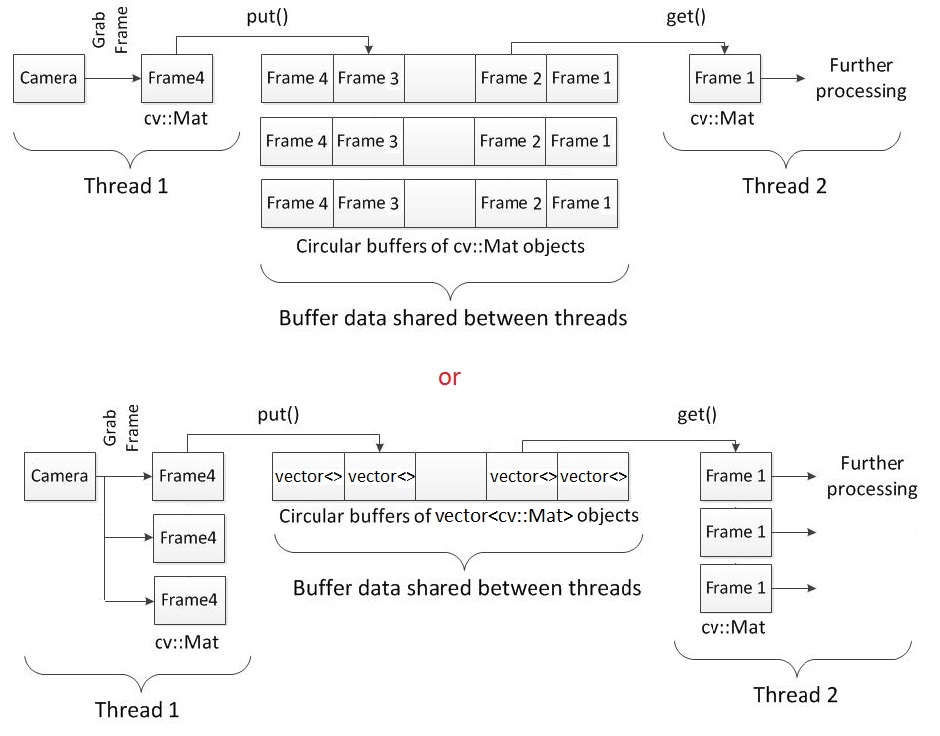
At the moment I am using the second approach with the vector, as it can be seen below:
//! [headers]
#include <iostream>
#include <stdio.h>
#include <iomanip>
#include <tchar.h>
#include <signal.h>
#include <opencv2/opencv.hpp>
#include <thread>
#include <mutex>
#include <queue>
#include <atomic>
#include <libfreenect2/libfreenect2.hpp>
#include <libfreenect2/frame_listener_impl.h>
#include <libfreenect2/registration.h>
#include <libfreenect2/packet_pipeline.h>
#include <libfreenect2/logger.h>
//! [headers]
using namespace std;
using namespace cv;
enum Process { cl, gl, cpu };
std::queue<vector<cv::Mat> > buffer;
std::mutex mtxCam;
std::atomic<bool> grabOn; // this is lock free
void grabber()
{
//! [context]
libfreenect2::Freenect2 freenect2;
libfreenect2::Freenect2Device *dev = nullptr;
libfreenect2::PacketPipeline *pipeline = nullptr;
//! [context]
//! [discovery]
if(freenect2.enumerateDevices() == 0)
{
std::cout << "no device connected!" << endl;
exit(EXIT_FAILURE);
// return -1;
}
string serial = freenect2.getDefaultDeviceSerialNumber();
// string serial = "014947350647";
std::cout << "SERIAL: " << serial << endl;
//! [discovery]
int depthProcessor = Process::cl;
if(depthProcessor == Process::cpu)
{
if(!pipeline)
//! [pipeline]
pipeline = new libfreenect2::CpuPacketPipeline();
//! [pipeline]
} else if (depthProcessor == Process::gl) {
#ifdef LIBFREENECT2_WITH_OPENGL_SUPPORT
if(!pipeline)
pipeline = new libfreenect2::OpenGLPacketPipeline();
#else
std::cout << "OpenGL pipeline is not supported!" << std::endl;
#endif
} else if (depthProcessor == Process::cl) {
#ifdef LIBFREENECT2_WITH_OPENCL_SUPPORT
if(!pipeline)
pipeline = new libfreenect2::OpenCLPacketPipeline();
#else
std::cout << "OpenCL pipeline is not supported!" << std::endl;
#endif
}
if(pipeline)
{
//! [open]
dev = freenect2.openDevice(serial, pipeline);
//! [open]
} else {
dev = freenect2.openDevice(serial);
}
if(dev == 0)
{
std::cout << "failure opening device!" << endl;
exit(EXIT_FAILURE);
// return -1;
}
//! [listeners]
libfreenect2::SyncMultiFrameListener listener(libfreenect2::Frame::Color |
libfreenect2::Frame::Depth |
libfreenect2::Frame::Ir);
libfreenect2::FrameMap frames;
dev->setColorFrameListener(&listener);
dev->setIrAndDepthFrameListener(&listener);
//! [listeners]
//! [start]
dev->start();
std::cout << "device serial: " << dev->getSerialNumber() << endl;
std::cout << "device firmware: " << dev->getFirmwareVersion() << endl;
//! [start]
//! [registration setup]
libfreenect2::Registration* registration = new libfreenect2::Registration(dev->getIrCameraParams(), dev->getColorCameraParams());
libfreenect2::Frame undistorted(512, 424, 4), rgb2depth(512, 424, 4), depth2rgb(1920, 1080 + 2, 4);
//! [registration setup]
Mat rgbmat, depthmat, irmat, rgbdmat, rgbdmat2, depthImg2;
vector<Mat> matBuff;
while (grabOn.load() == true)
{
listener.waitForNewFrame(frames);
libfreenect2::Frame *rgb = frames[libfreenect2::Frame::Color];
libfreenect2::Frame *ir = frames[libfreenect2::Frame::Ir];
libfreenect2::Frame *depth = frames[libfreenect2::Frame::Depth];
//! [loop start]
cv::Mat(rgb->height, rgb->width, CV_8UC4, rgb->data).copyTo(rgbmat);
cv::Mat(ir->height, ir->width, CV_32FC1, ir->data).copyTo(irmat);
// cv::Mat(depth->height, depth->width, CV_32FC1, depth->data).copyTo(depthmat);
//! [registration]
registration->apply(rgb, depth, &undistorted, &rgb2depth, true, &depth2rgb);
//! [registration]
cv::Mat(undistorted.height, undistorted.width, CV_32FC1, undistorted.data).copyTo(depthmat);
cv::Mat(rgb2depth.height, rgb2depth.width, CV_8UC4, rgb2depth.data).copyTo(rgbdmat);
cv::Mat(depth2rgb.height, depth2rgb.width, CV_32FC1, depth2rgb.data).copyTo(rgbdmat2);
mtxCam.lock();
matBuff.push_back(irmat.clone()); // should that be a .clone()?
matBuff.push_back(depthmat.clone());
matBuff.push_back(rgbdmat.clone());
buffer.push(matBuff);
mtxCam.unlock();
matBuff.clear();
putText(irmat, "THREAD FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image thread - ir", irmat / 4500.0f);
putText(depthmat, "THREAD FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image thread - depth", depthmat / 4500.0f);
putText(rgbdmat, "THREAD FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image thread - rgbd", rgbdmat);
waitKey(1); //just for imshow
//! [loop end]
listener.release(frames);
}
//! [stop]
dev->stop();
dev->close();
//! [stop]
delete registration;
}
void processor(vector<Mat> &imgs/*const Mat &src*/)
{
if(imgs.empty()) return;
putText(imgs[0], "PROCESS FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image main - ir", imgs[0] / 4500.0f);
putText(imgs[1], "PROCESS FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image main - depth", imgs[1] / 4500.0f);
putText(imgs[2], "PROCESS FRAME", Point(10, 10), CV_FONT_HERSHEY_PLAIN, 1, cv::Scalar(0, 255, 0));
imshow("Image main - rgbd", imgs[2]);
}
int main() {
std::cout << "Hello World!" << std::endl;
// Mat frame;
vector<Mat> frames;
grabOn.store(true); // set the grabbing control variable
thread t(grabber); // start the grabbing task
size_t bufSize;
while (true) {
mtxCam.lock(); // lock memory for exclusive access
bufSize = buffer.size(); // check how many frames are waiting
if (bufSize > 0) // if some
{
// reference to buffer.front() should be valid after
// pop because of cv::Mat memory reference counting
// but it's content can change after unlock, better to keep a copy
// an alternative is to unlock after processing (this will lock grabbing)
frames = buffer.front();
// buffer.front().copyTo(frame); // get the oldest grabbed frame (queue=FIFO)
buffer.pop(); // release the queue item
}
mtxCam.unlock(); // unlock the memory
if (bufSize > 0) // if a new frame is available
{
// cout << "inside...................: " << bufSize << endl;
processor(frames); // process it
bufSize--;
}
// if bufSize is increasing means that process time is too slow regards to grab time
// may be you will have out of memory soon
cout << endl << "frame to process:" << bufSize;
if (waitKey(1) == 27) // press ESC to terminate
{
grabOn.store(false); // stop the grab loop
t.join(); // wait for the grab loop
cout << endl << "Flushing buffer of:" << bufSize << " frames...";
while (!buffer.empty()) // flushing the buffer
{
frames = buffer.front();
buffer.pop();
processor(frames);
}
cout << "done" << endl;
break; // exit from process loop
}
}
// cout << endl << "Press Enter to terminate"; cin.get();
std::cout << "Goodbye World!" << std::endl;
return 0;
}
Is that ok what do you think? @pklab? For the moderators, though it is not a pure OpenCV question I think it suits to the form of the forum and I think that it would be quite useful for others as well.