Hello , I am working on an C++ OpenCV program to determine the height of the 24 relevant points P of a given structure through what it 'sees' through a camera or image stream. I would appreciate your help on what techniques and methods should I consider and also, what literature you think would be of most value to develop such a solution. Thank you very much for your time and input.
The P points have fxed X,Y coordinates. The cubes are 2 x 2 x 2 and the X,Y coordinates can be found here. The height Z varies over time.
I will apply the same technique to other such structures that differ in shape, color, thickness, etc.
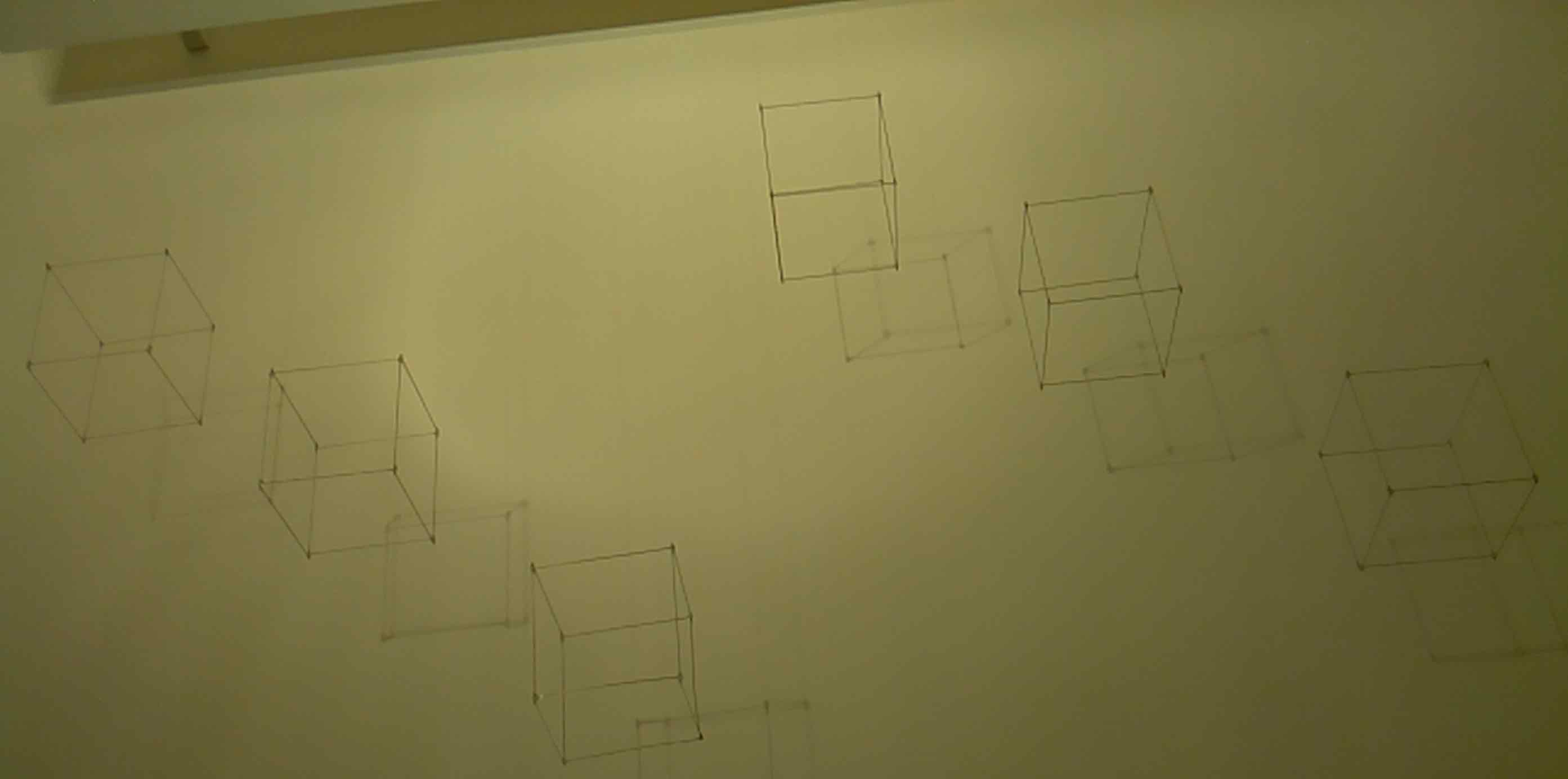
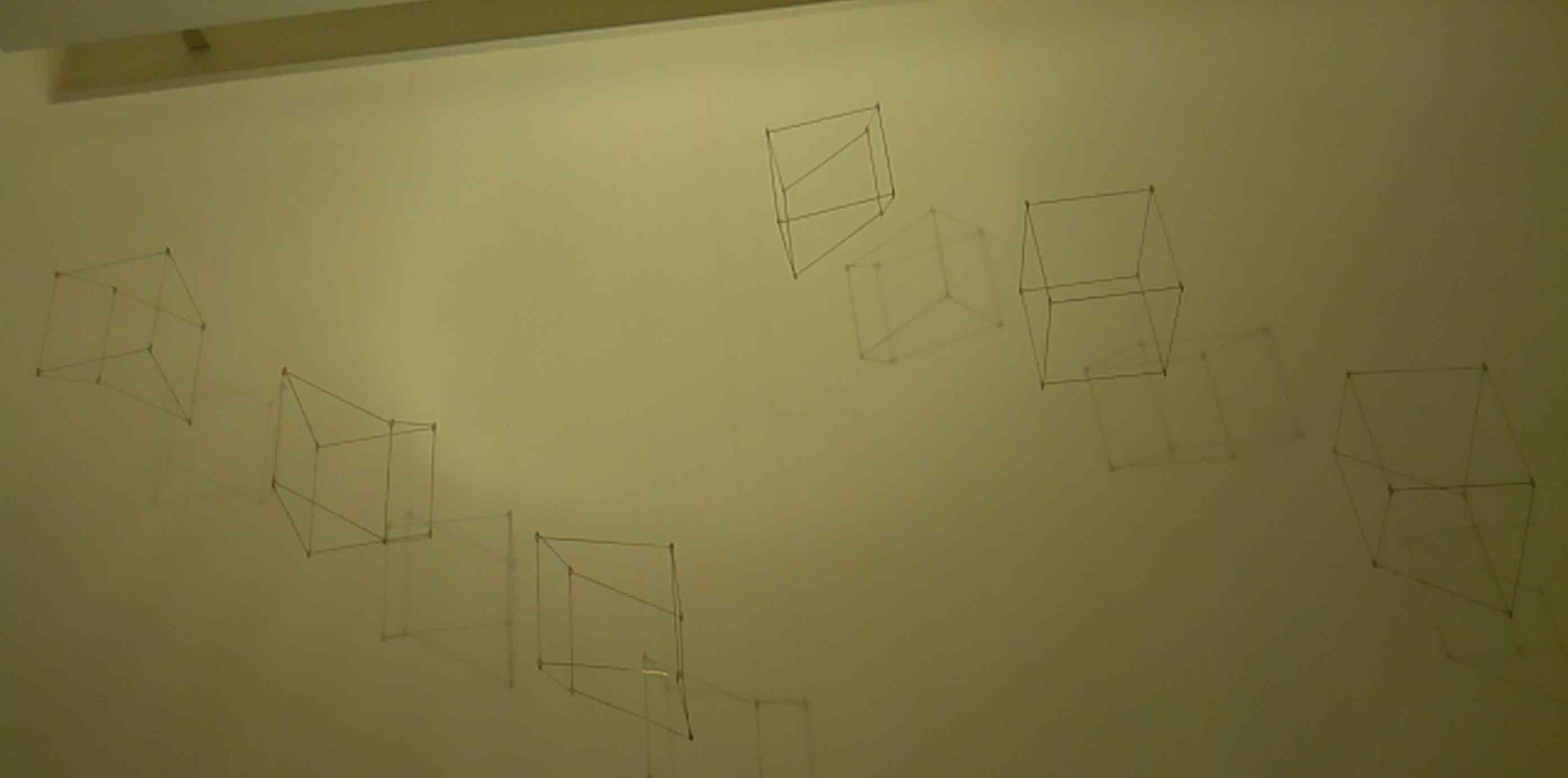
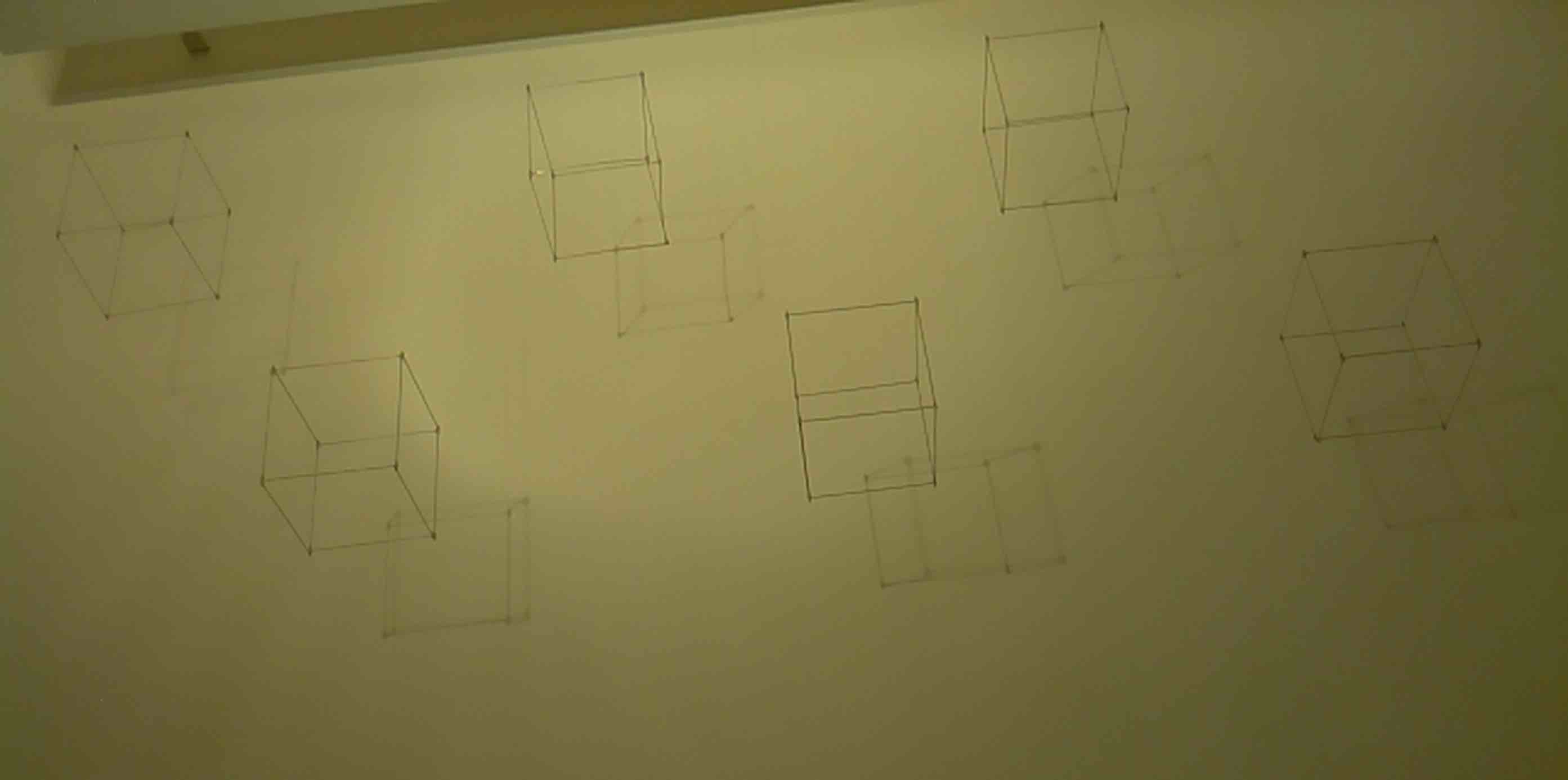
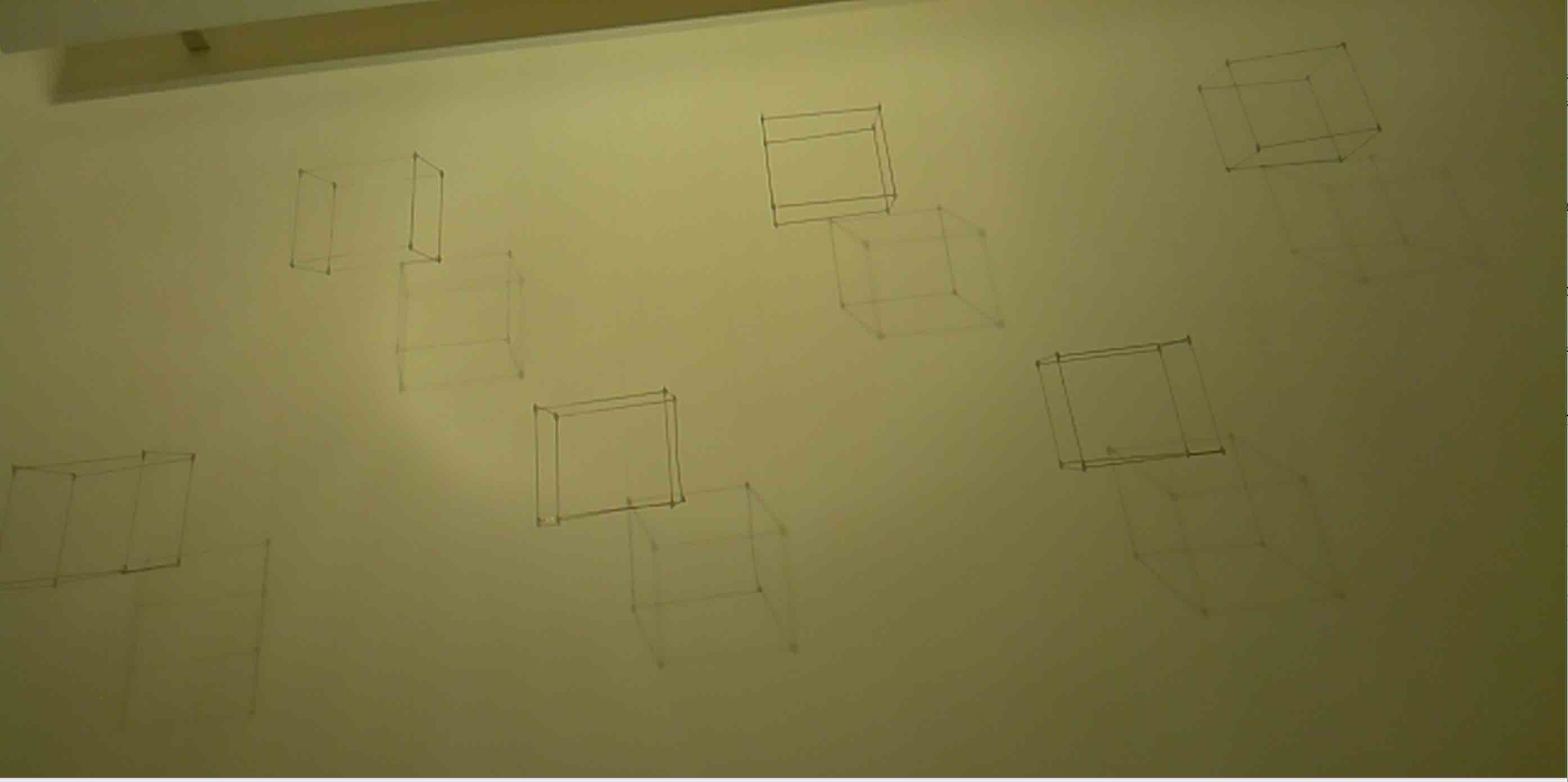
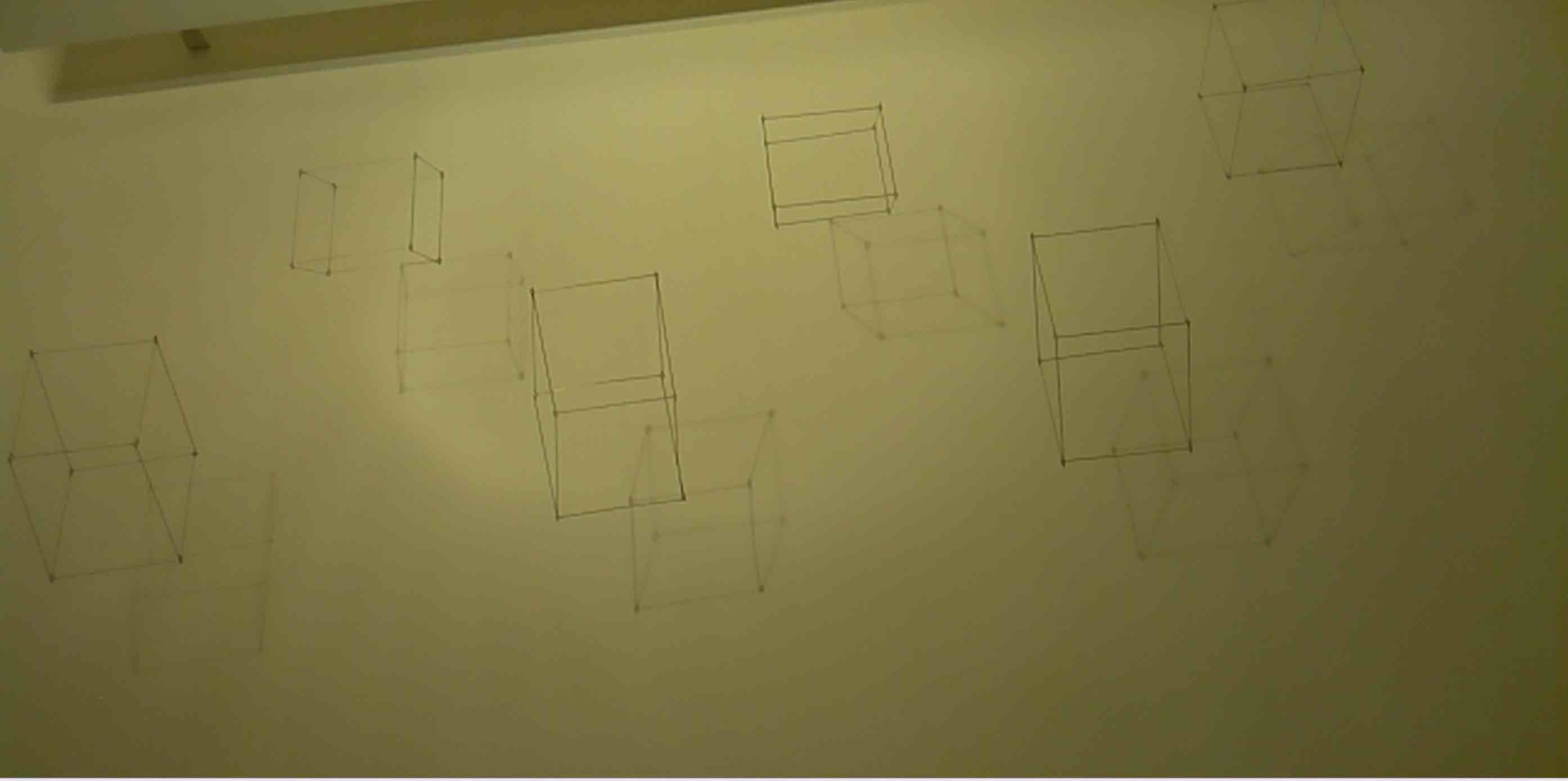
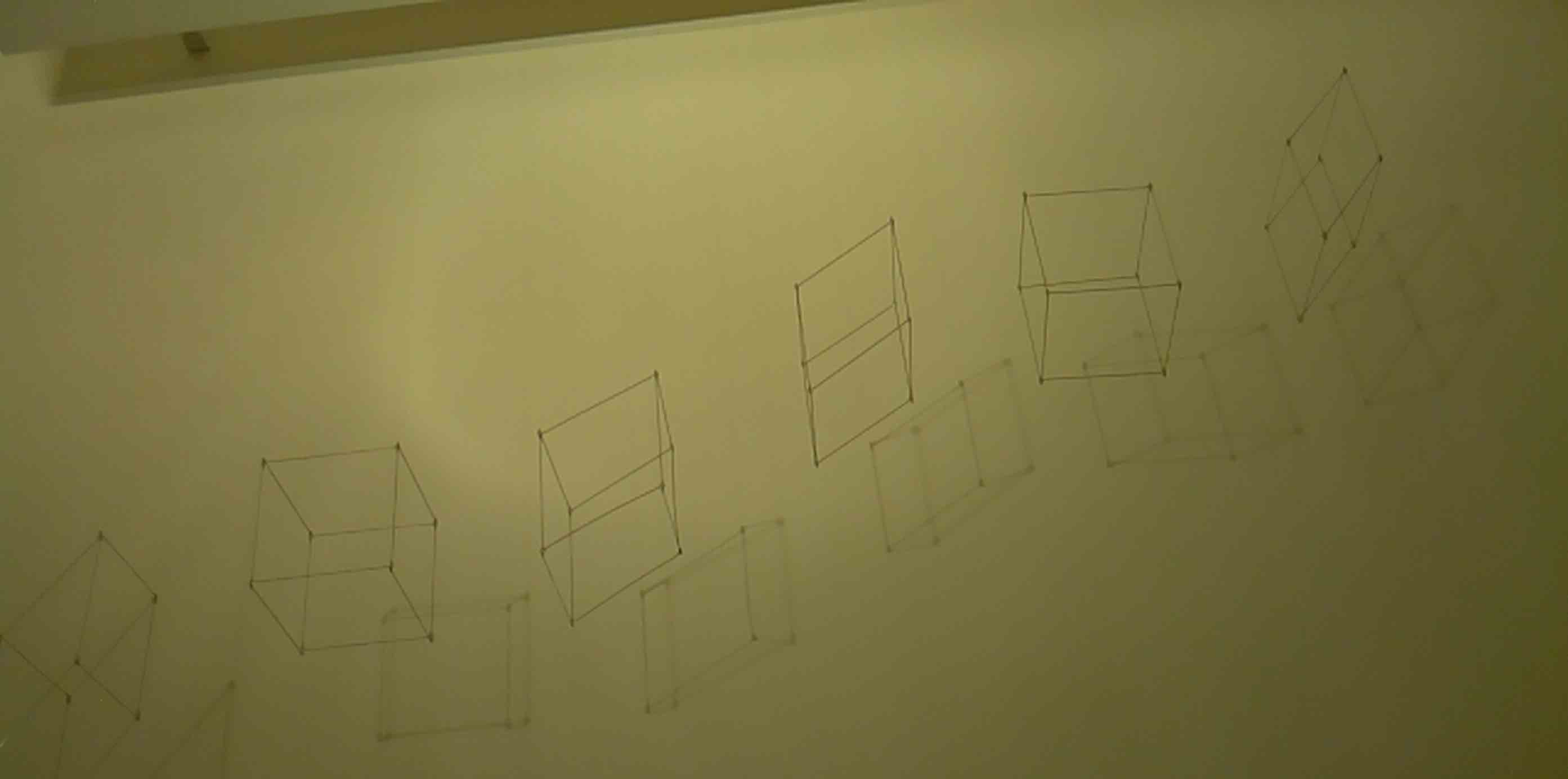
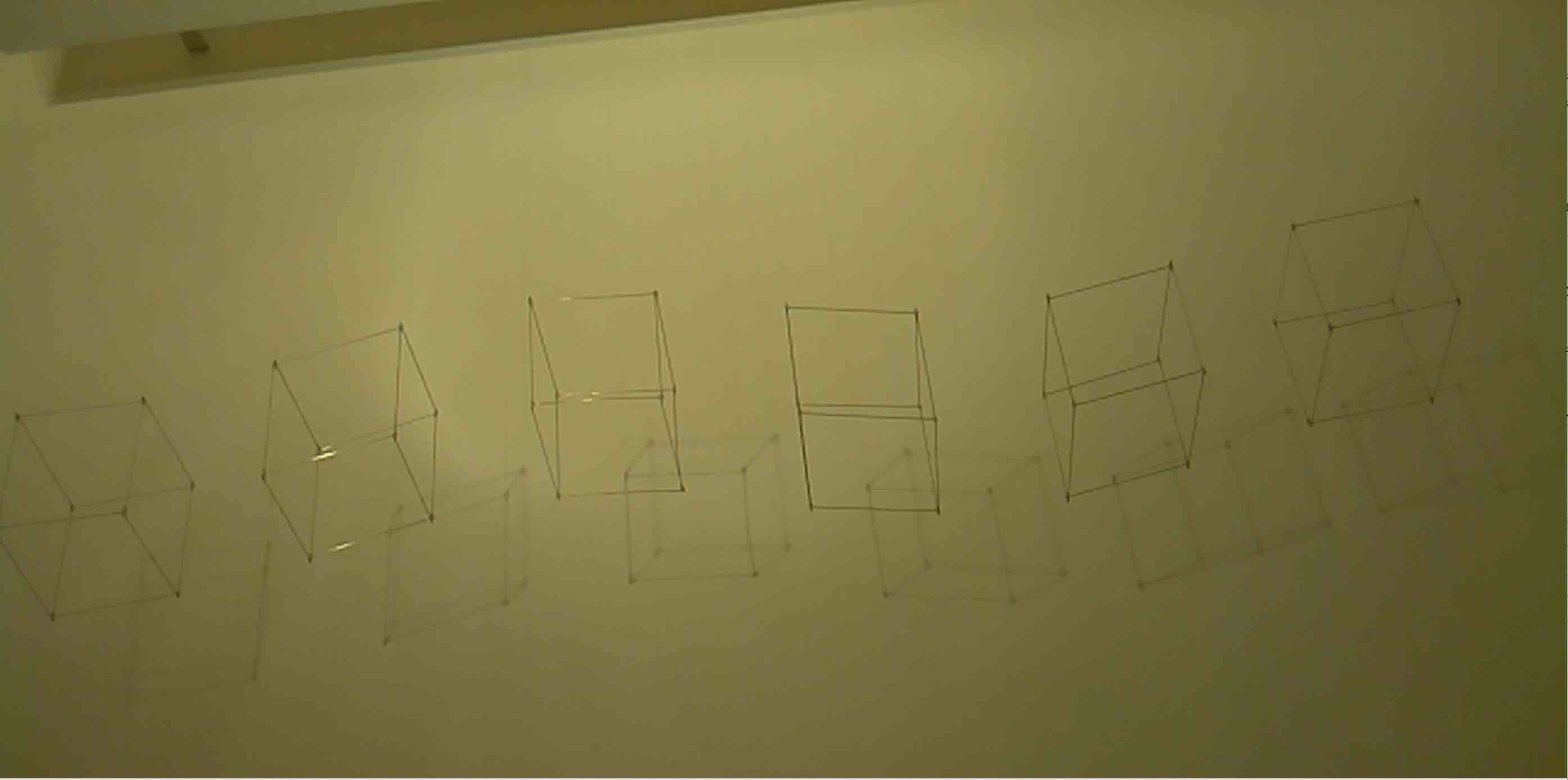
In this case the structure is composed of 6 wireframe cubes. The relevant points P are the top four corners of each cube as shown numbered in the following image. Red is wall side, green is front.
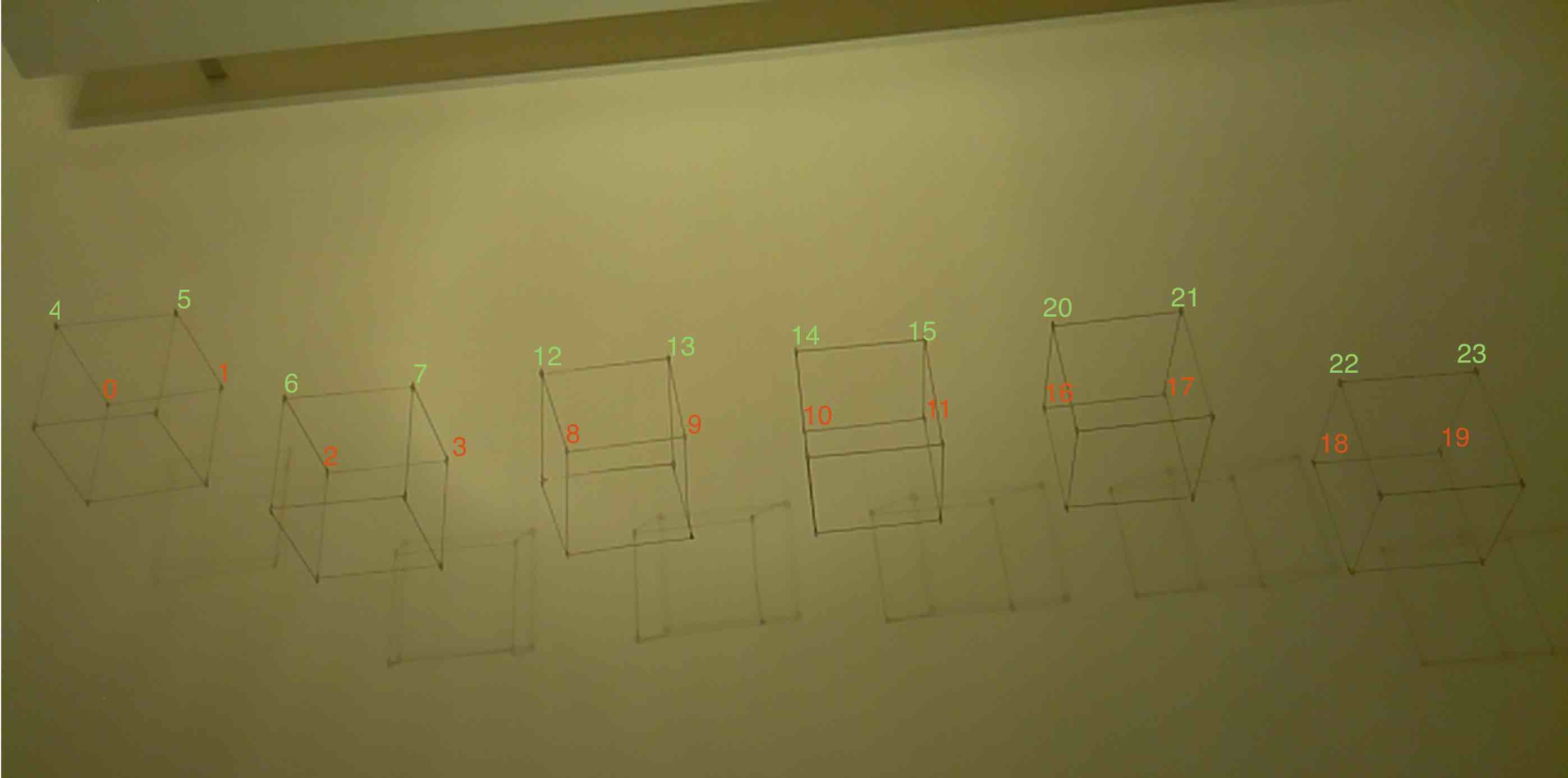
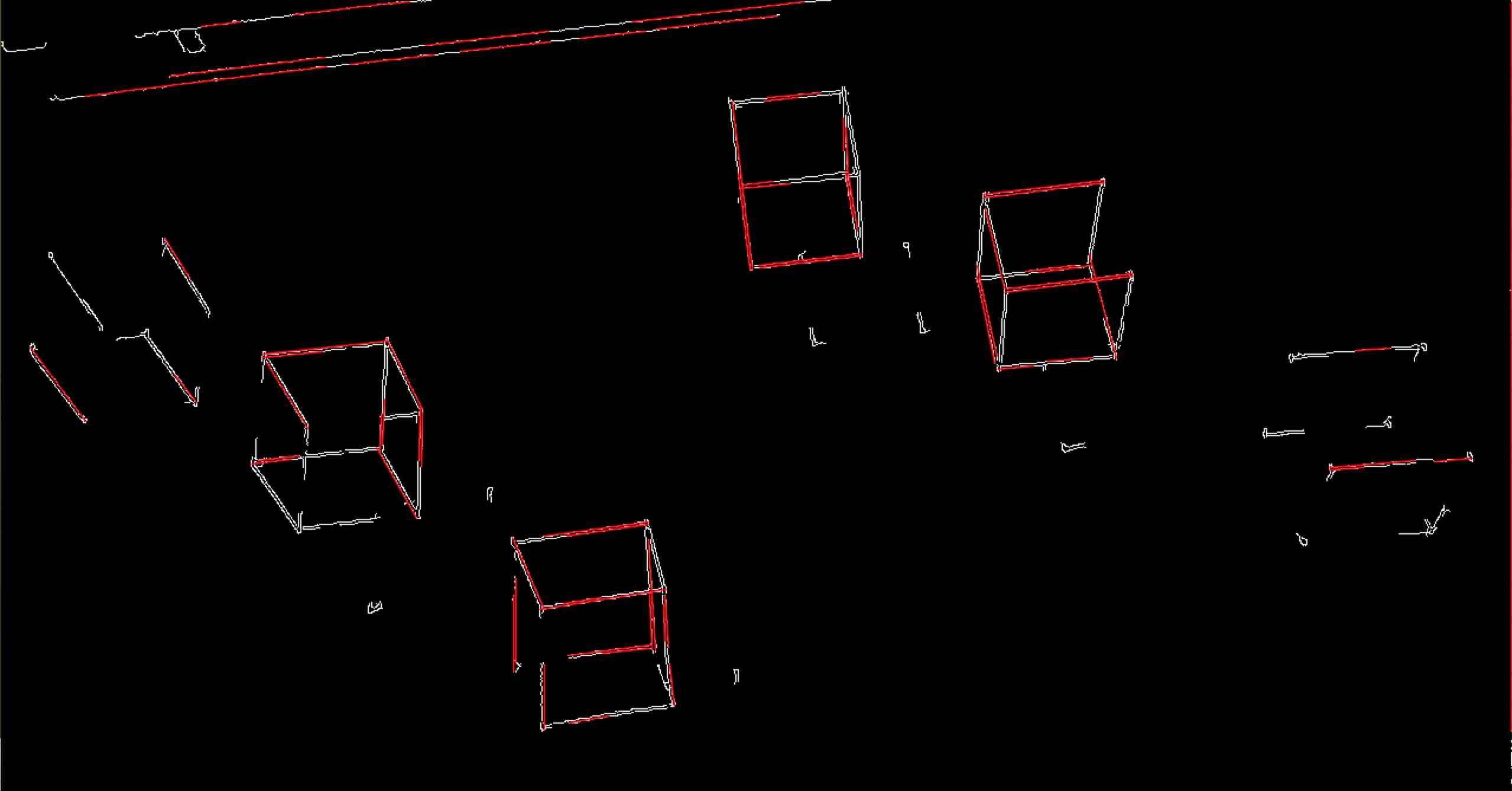
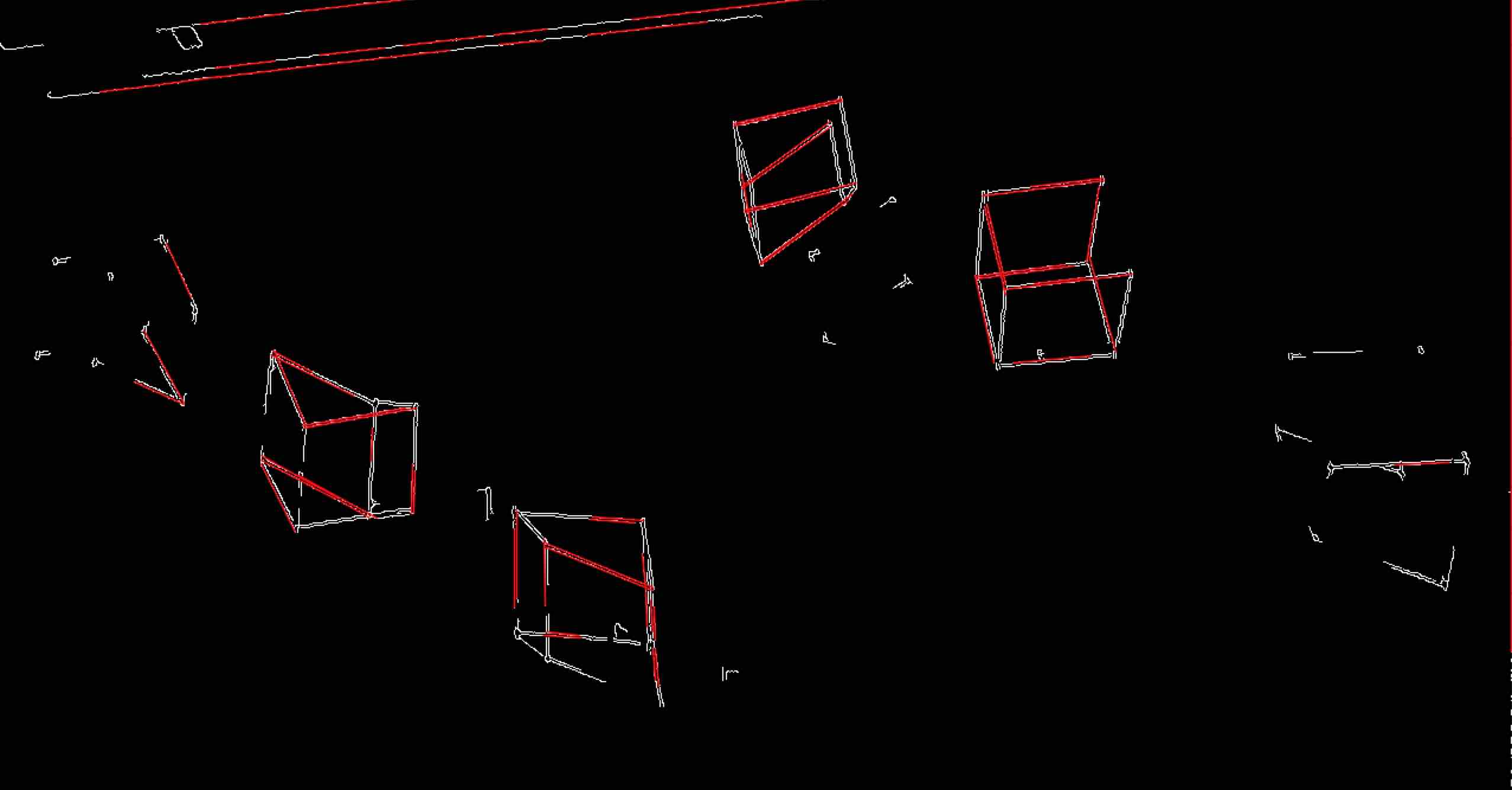
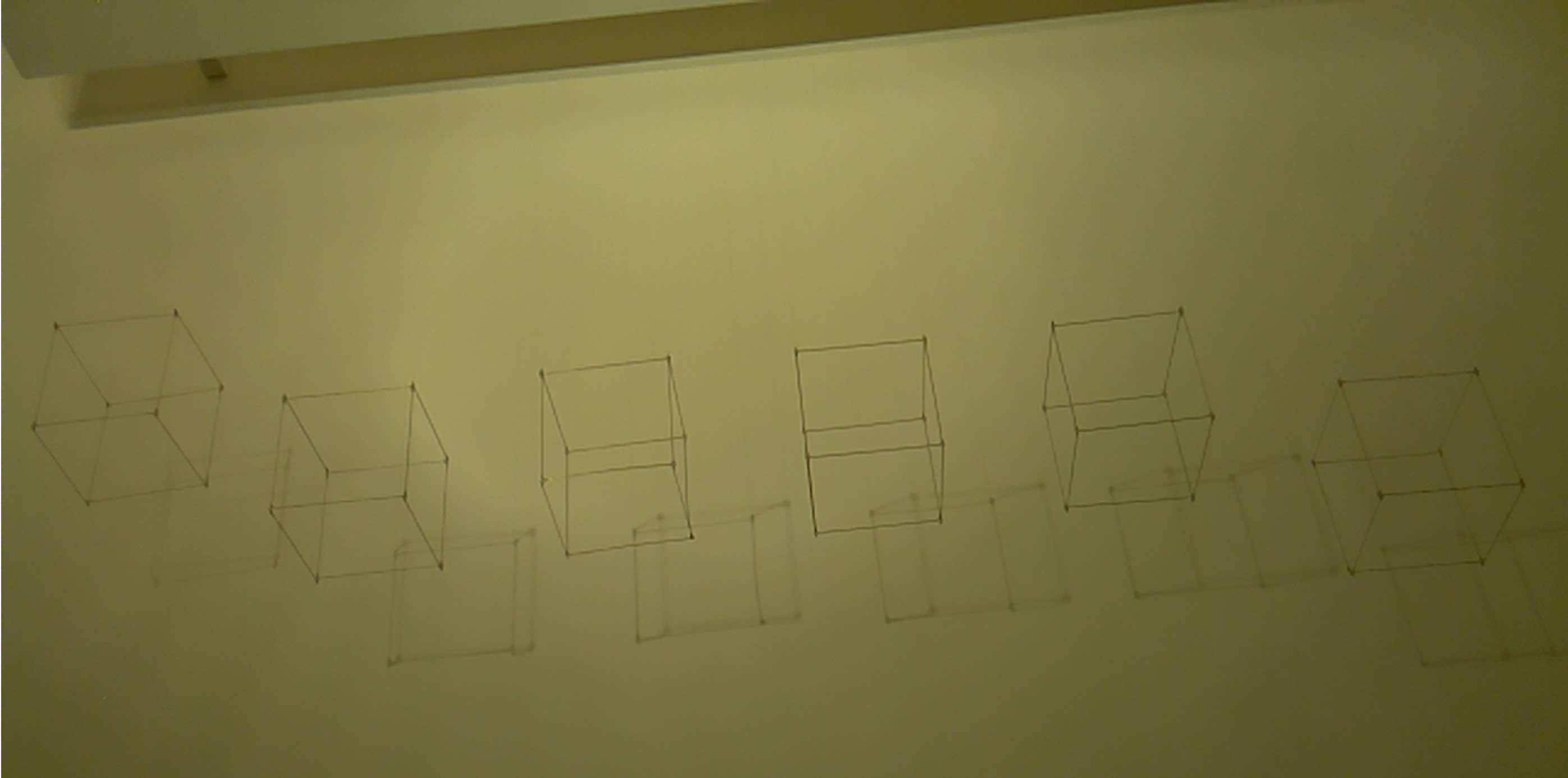
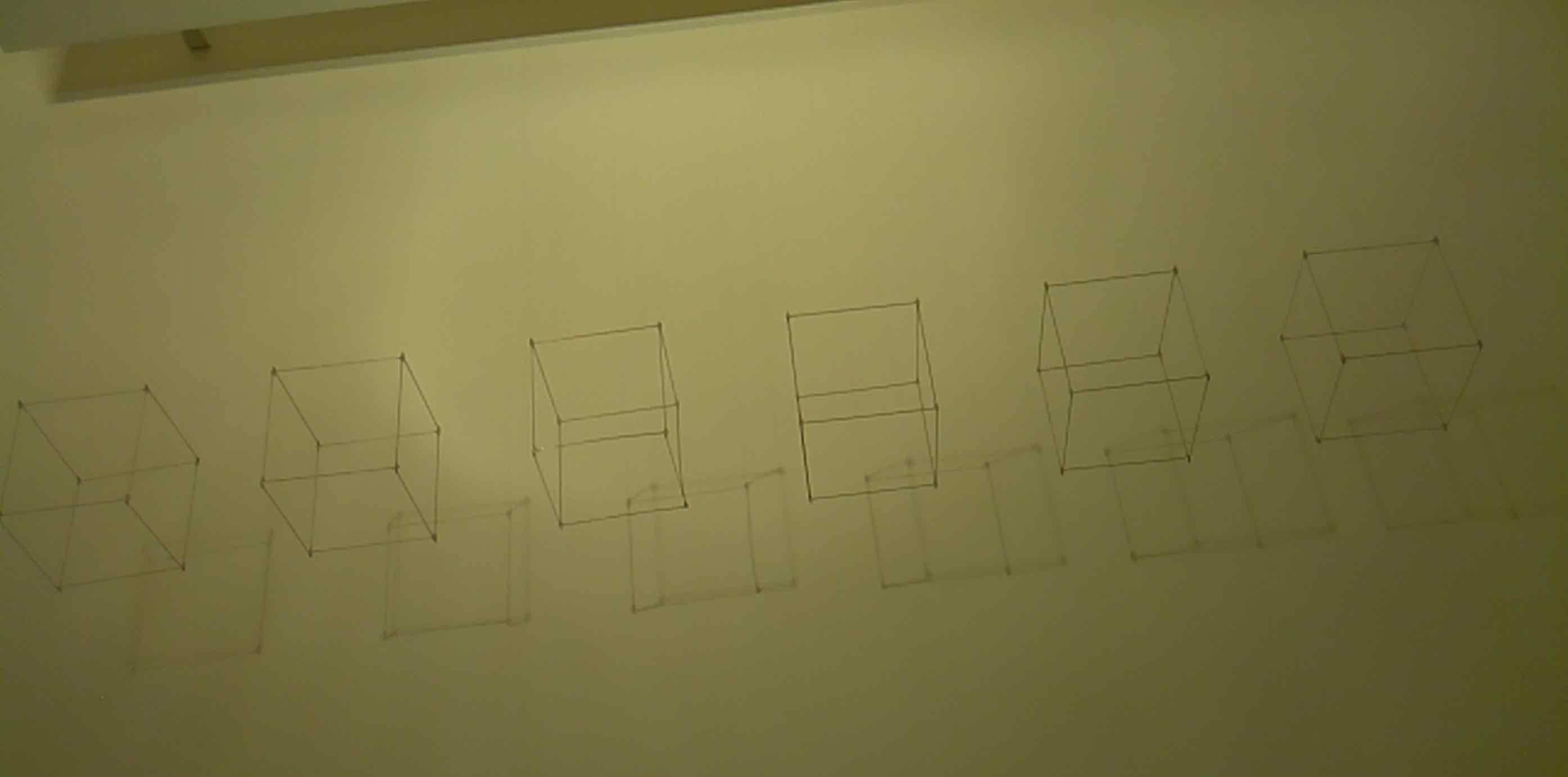
Following you will find some images of the structure at different points in time.
Link to full size images
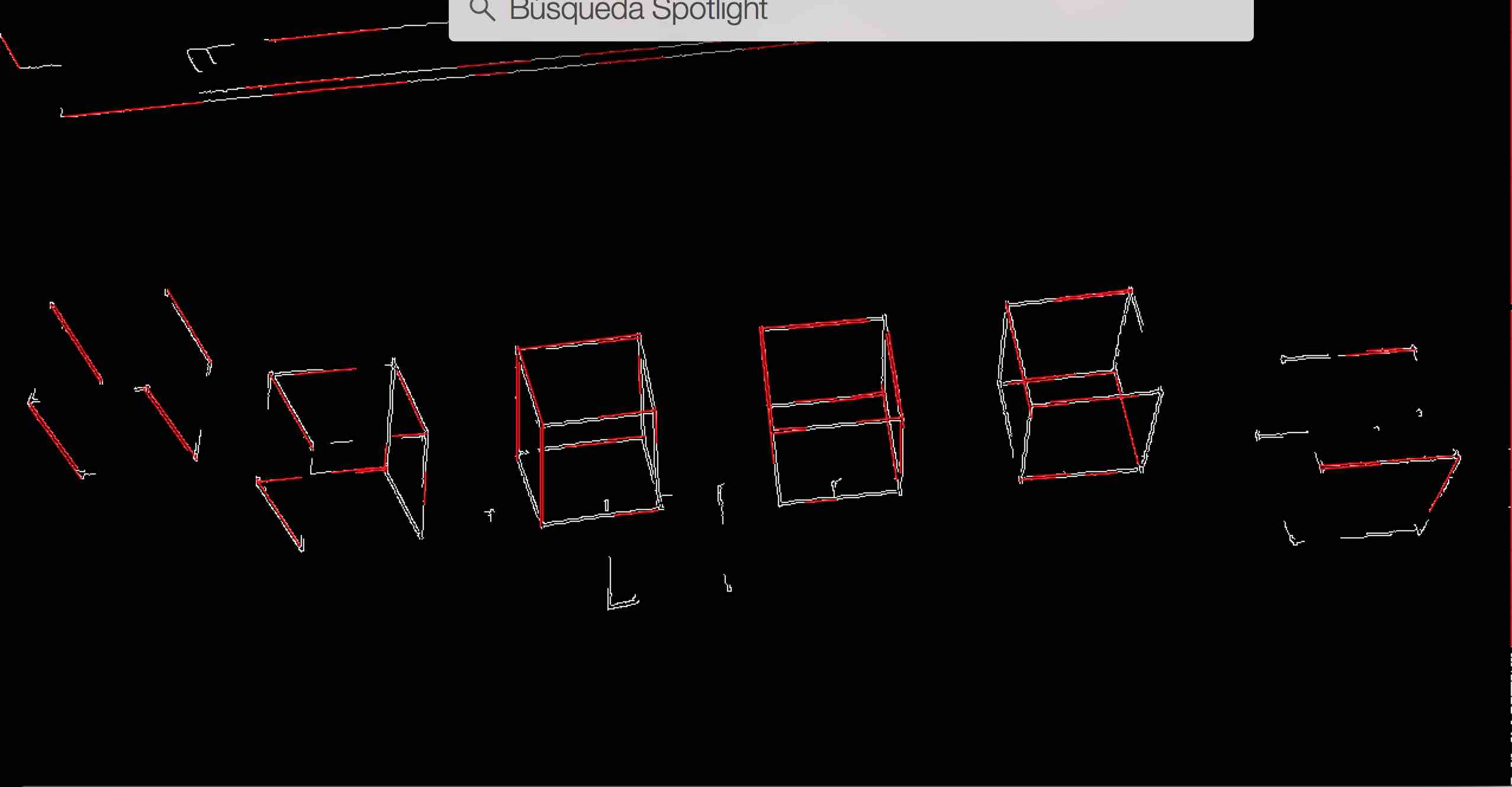
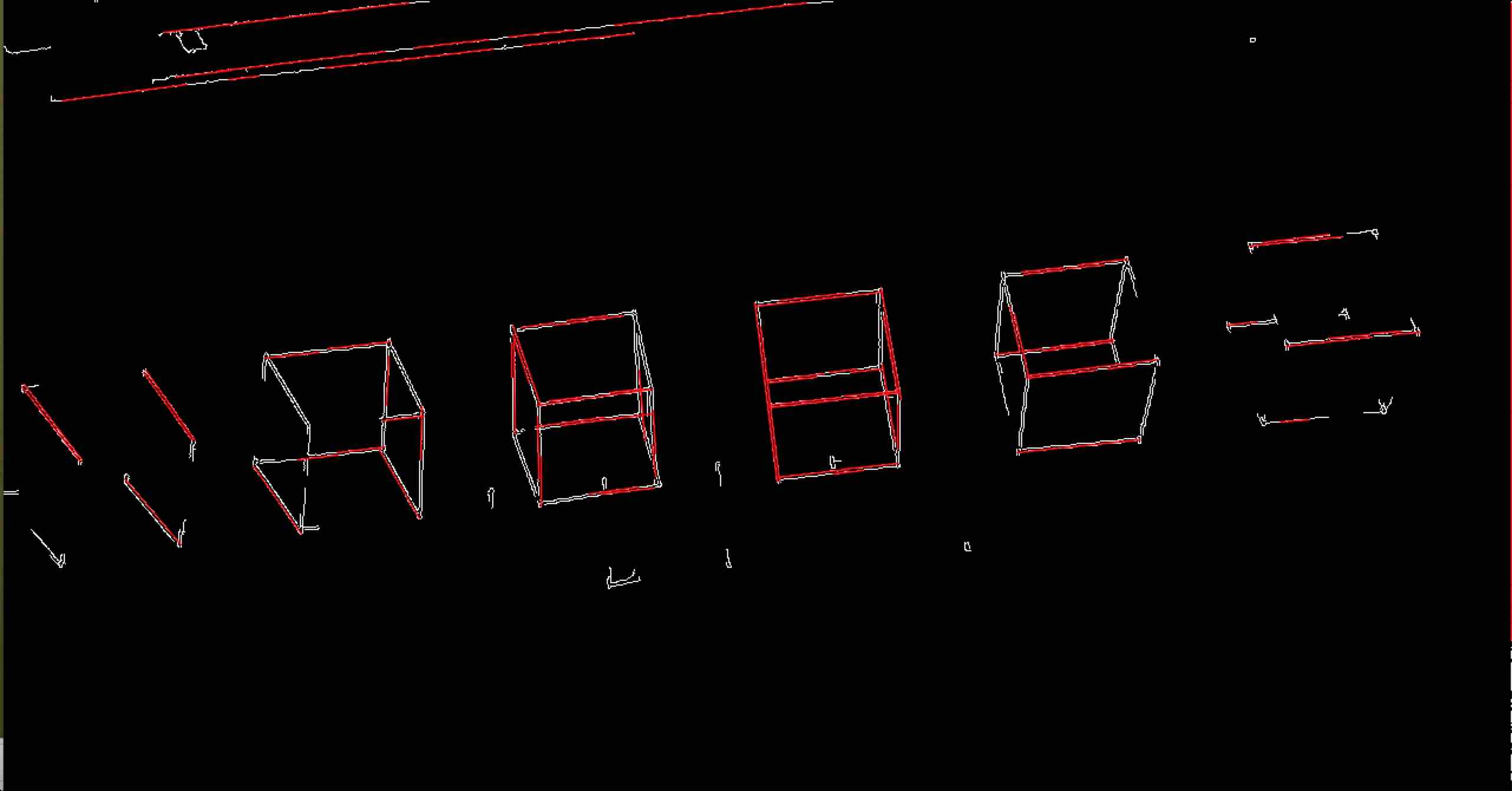
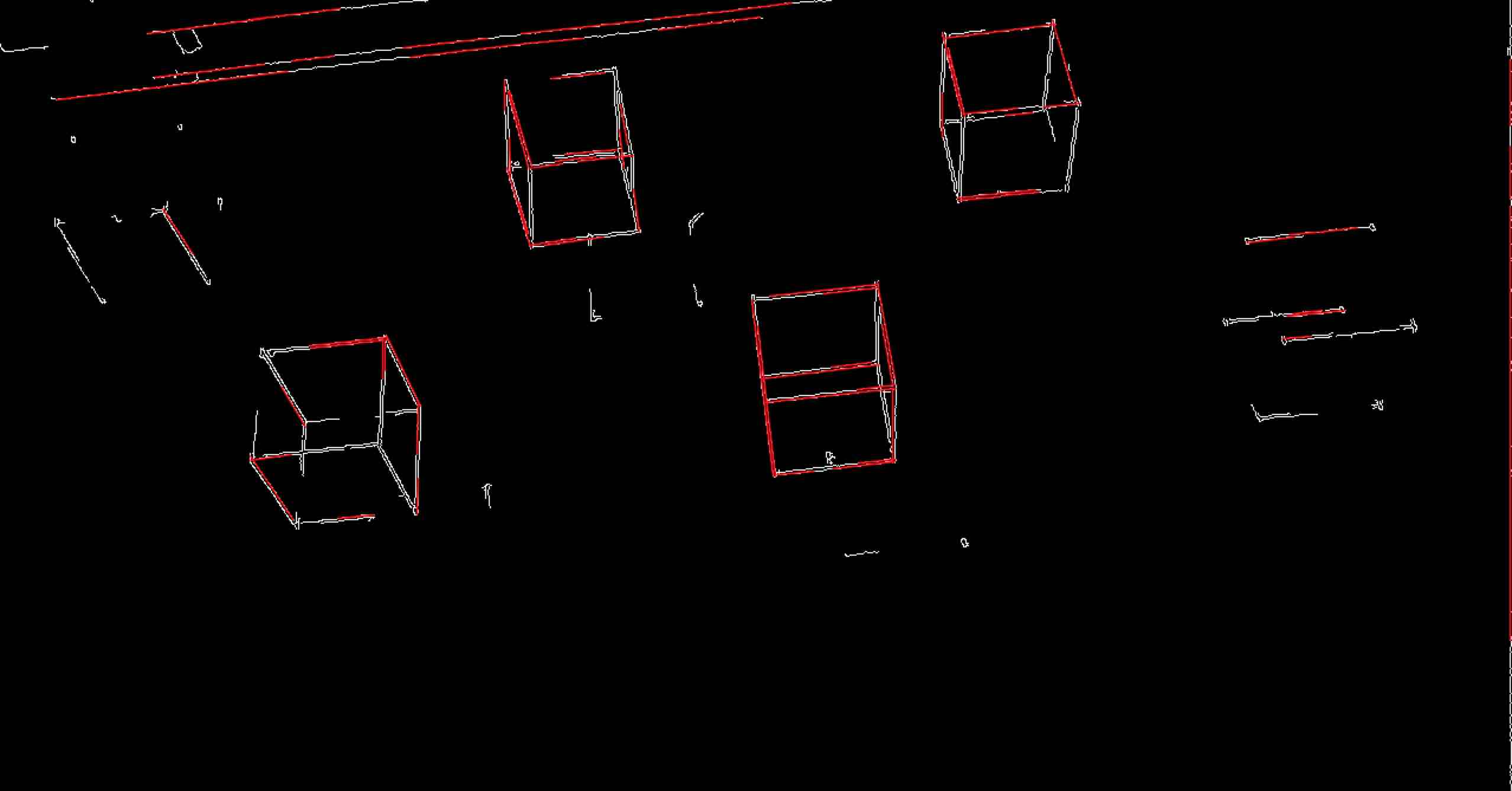
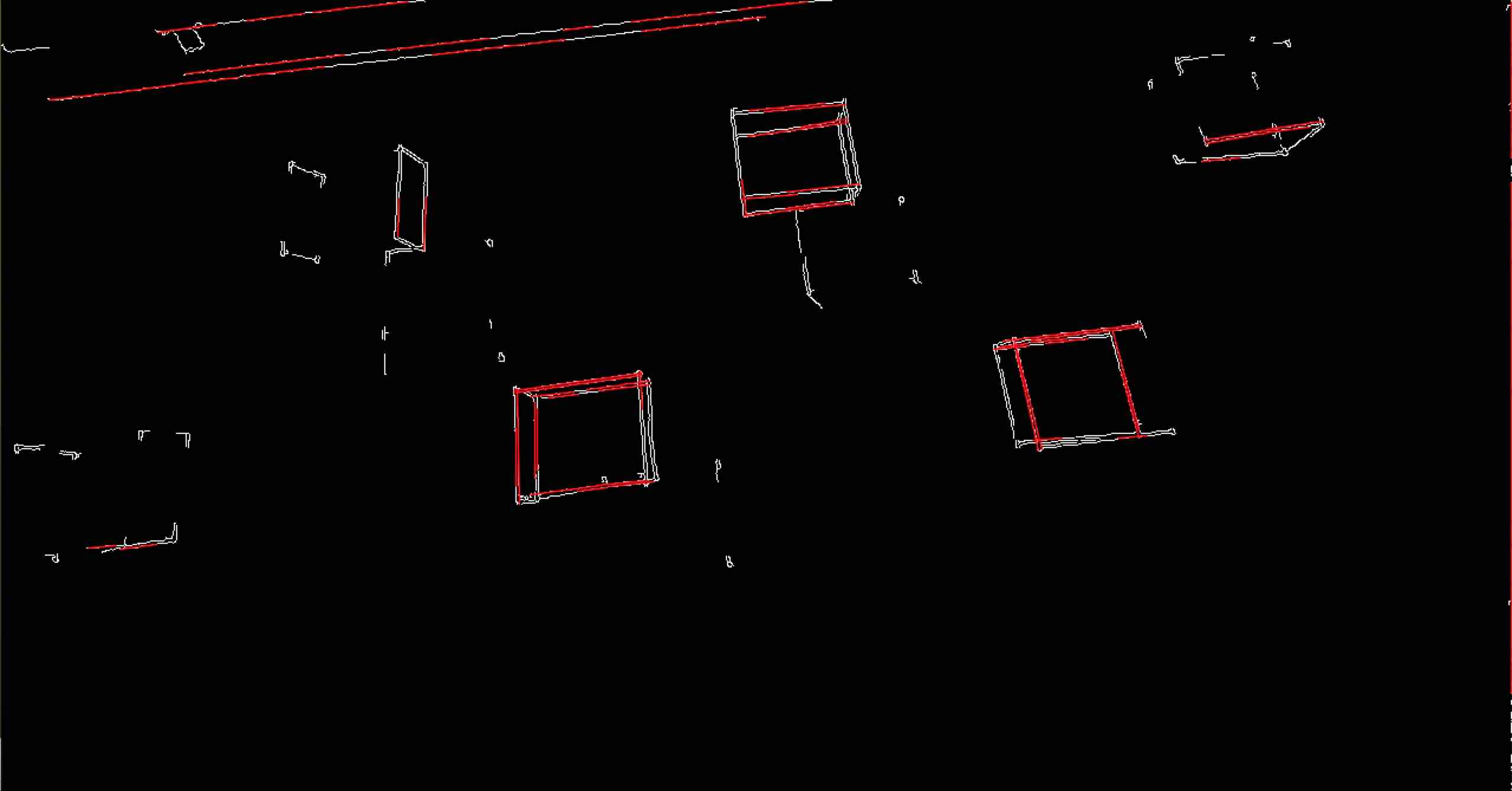
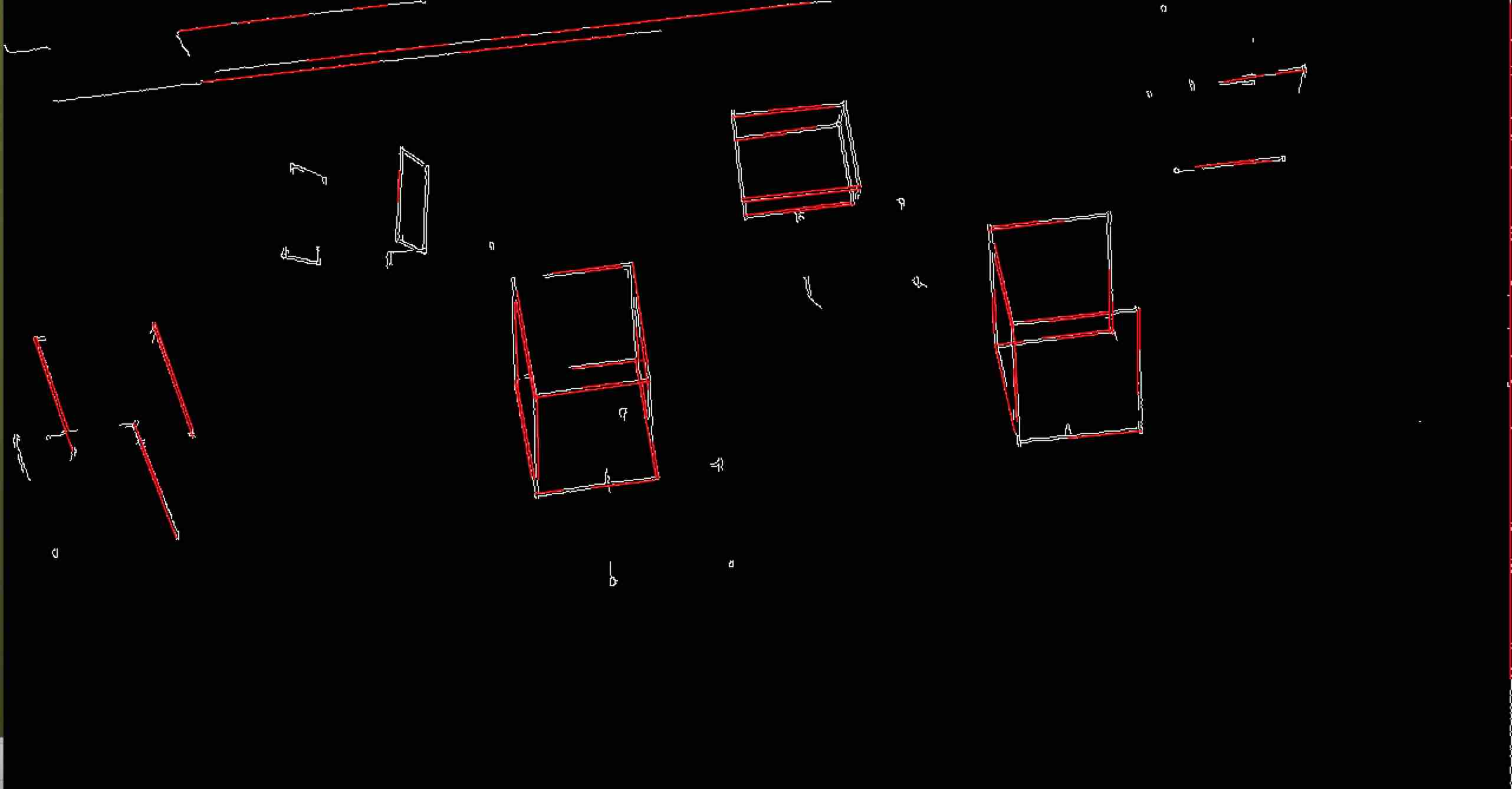
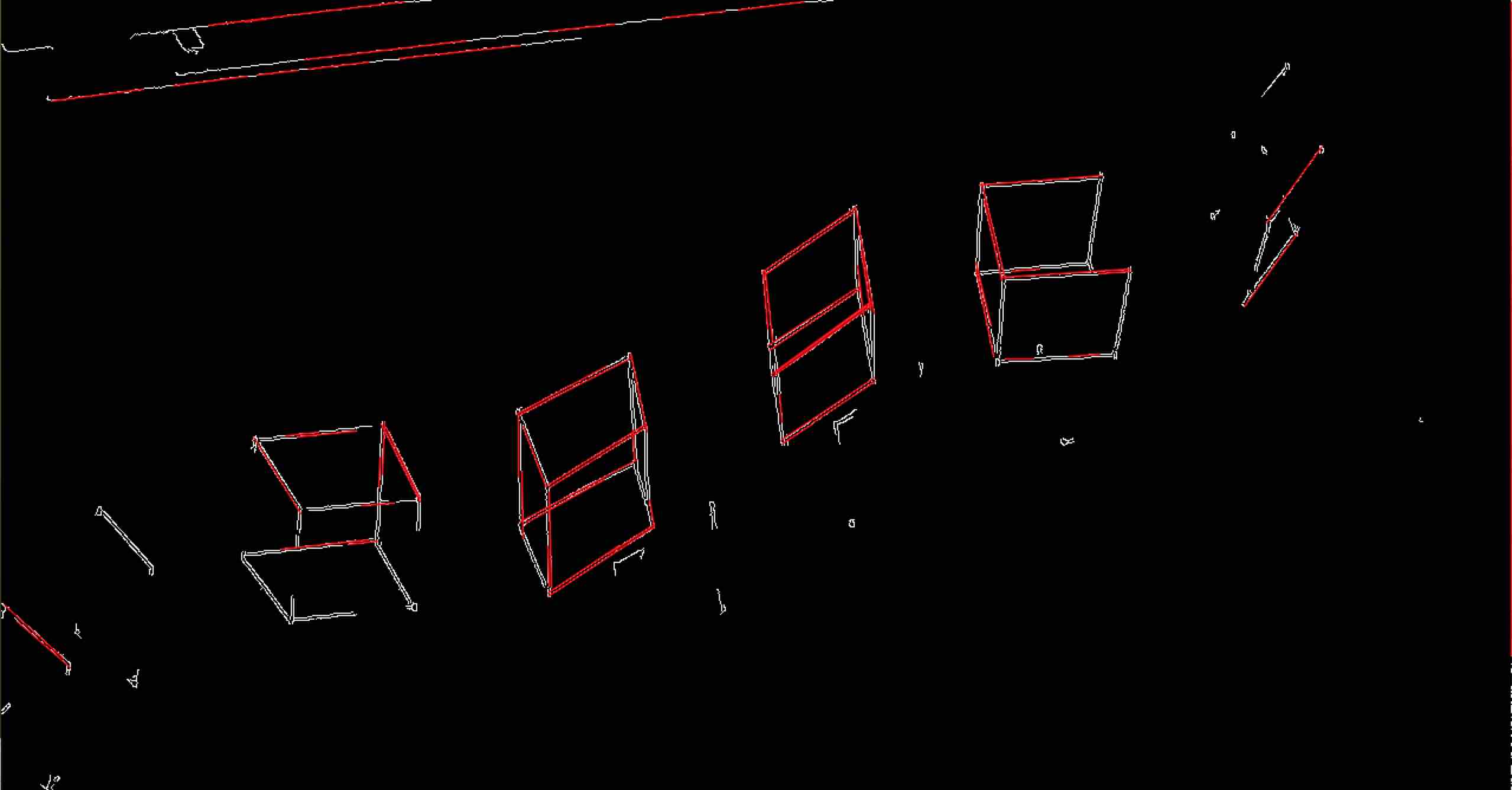
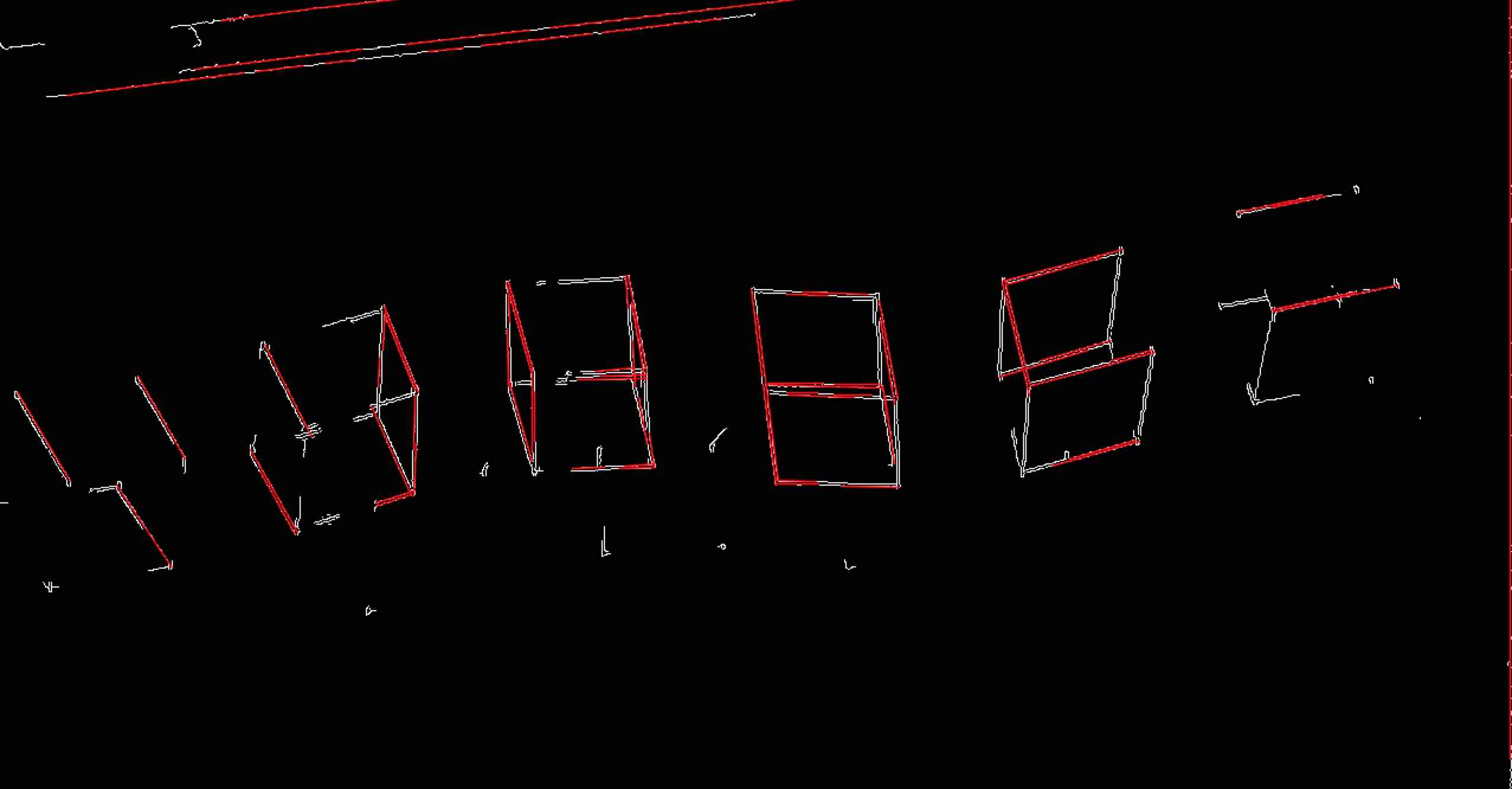
In order to get a glimpse of how it could work, I modified the OpenCV sample camera_calibrate.cpp. I removed the findChessBoardCorners and process the input with Canny and HoughLinesP calls.
The code change to the camera_calibration.cpp sample instead of the findChessBoardCorners logic the following code is placed instead:
Canny(view, dst, 34, 3*34);
vector<Vec4i> lines;
HoughLinesP(dst, lines, 1 , CV_PI/180 , 59 /* threshold */ , 24 /* min line length */ ,
4 /* max line gap */ );
cvtColor(dst, cdst, CV_GRAY2BGR);
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line( cdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 1, CV_AA);
}
//------------------------------ Show image and check for input commands -------------------
imshow( probabilistic_name, cdst);
The output looks like this: