I am trying to detect quadrilateral and going to do a perspective correction based on http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/ by using probabilistic hough transform.
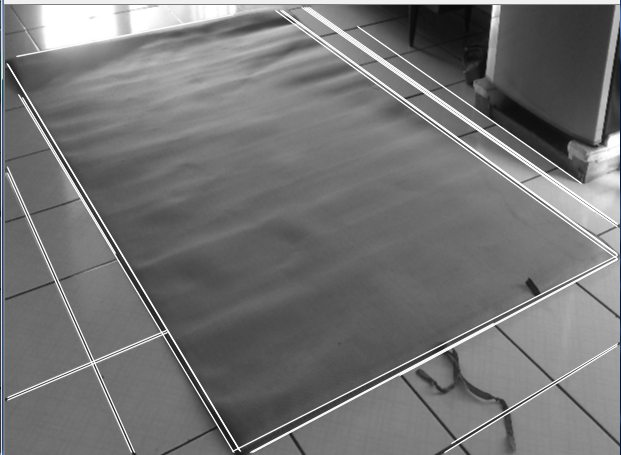
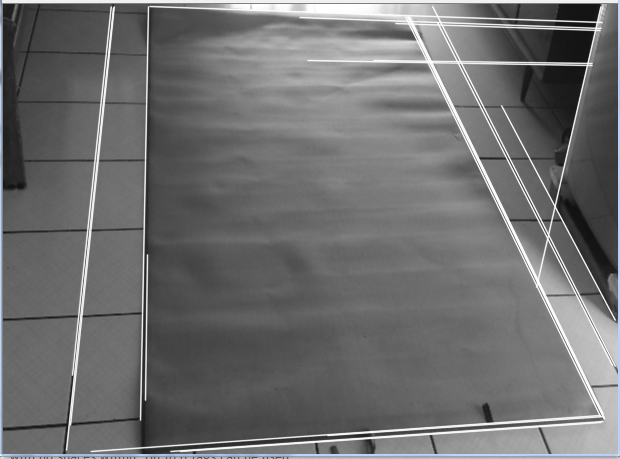
I only need 4 lines, but i ended up with other things (as you can see in the picture)
it's on purpose that i take the object of interest with other square environment ( to see if my program is adaptive)
i tried to play with the threshold and other parameter but these 2 images are the best that i can end up with.
can anyone help me to prune other lines except the 4 lines that i need (the ones that make a quadrilateral) thanks.
int main()
{
//initialize the mat and variables
cv::Mat bw,rsz,roi,circleroi,result,dst,cannyimg;
int t1min =109;
//we want to adjust the size to 800x600
Size size(800,600); //the dst image size,e.g.800x600
//load the image
cv::Mat src = cv::imread("D:\\image\\perspective.jpg");
if (src.empty())
return -1;
//create windows
cvNamedWindow( "houghlinep", CV_WINDOW_AUTOSIZE );
while(1)
{
//create trackbars
char TrackbarName1[50]="t1min";
cvCreateTrackbar(TrackbarName1, "houghlinep", &t1min, 260 , NULL );
if (t1min<=10)
t1min=10;
//resize image
resize(src,rsz,size);
//adjust the image boundary
roi = rsz(cv::Range(110,560),cv::Range(70,685));
//make the image grayscale to make it easier to canny
cv::cvtColor(roi, bw, CV_BGR2GRAY);
//blur it to make it easier to canny
cv::blur(bw, bw, cv::Size(2,2));
//edge detect with canny operator
cv::Canny(bw, dst, 50,100, 3);
//copy the result to cannyimg
dst.copyTo(cannyimg);
//make lines object
vector<Vec4i> lines;
//use houghlinesp to dst
HoughLinesP(dst, lines, 1, CV_PI/180,t1min, 140, 80 );
//illustrate the line on the black n white image
char count=1;
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line(bw, Point(l[0], l[1]), Point(l[2], l[3]), CV_RGB(0,255,255), 1, CV_AA);
}
/*for (int i = 0; i < lines.size(); i++)
{
cv::Vec4i l = lines[i];
lines[i][0] = 0;
lines[i][1] = ((float)l[1] - l[3]) / (l[0] - l[2]) * -l[0] + l[1];
lines[i][2] = bw.cols;
lines[i][3] = ((float)l[1] - l[3]) / (l[0] - l[2]) * (bw.cols - l[2]) + l[3];
}*/
//show the images
cv::imshow("canny",cannyimg);
cv::imshow("houghlinep",bw);
cv::imshow("yeah",roi);
if(t1min=t1min) cvWaitKey(0);
if( (cvWaitKey(10) & 255) == 27 ) break;
cvReleaseFileStorage;
}
return 1;
}
