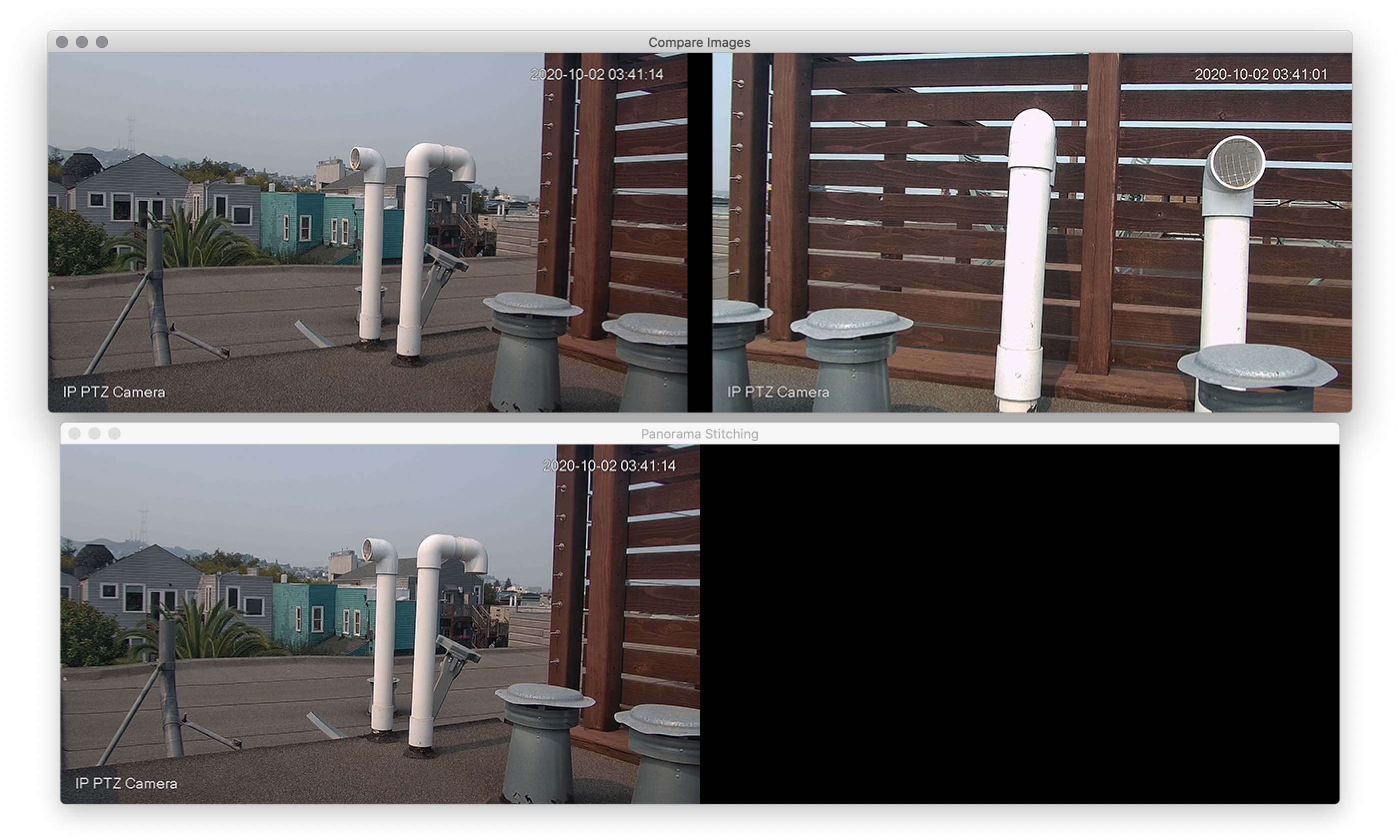
I have a security camera that is rotating at 1rpm. It is set to 60° FOV, and configured on a preset to take 8 pictures in 1 rotation. With the knowledge of the FOV as well as the picture's direction (angle), how could I use OpenCV to stitch the 8 pictures together into a single 360° panoramic?
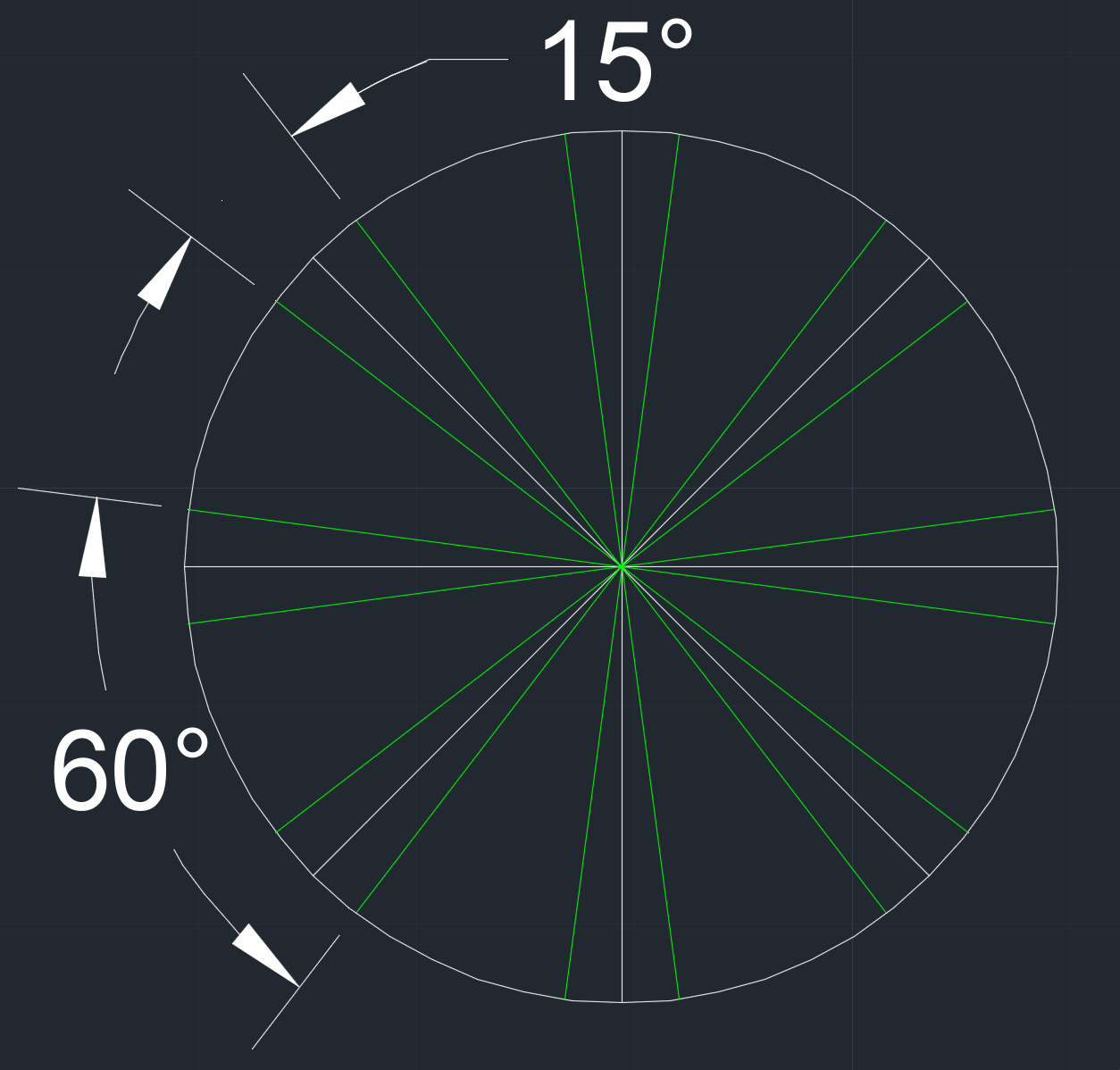
With 60° FOV at 8 pictures per rotation, there are 15° of overlap on each side of the picture.
With this information, it possible for me to compute the homography matrix manually? If so, I would greatly appreciate some direction!