Hi,
I have a question regarding pose estimation of ArUco markers and coordinate system translation. What I would basically like to accomplish is to get the coordinates of a marker using a coordinate system that is based on another marker.
Let me explain. The plan is to use one stationary marker as a calibration point. After getting the rvec and tvec vectors of that calibration marker I would then like to use this information to calculate the coordinates of the others, in the calibration marker’s coordinate system. (note that the camera and calibration tag are stationary, while the others move)
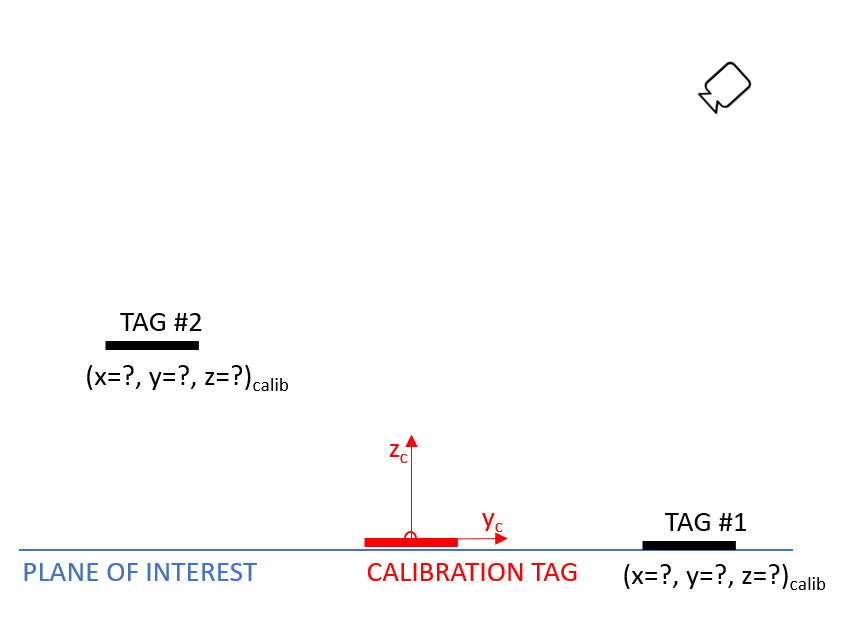
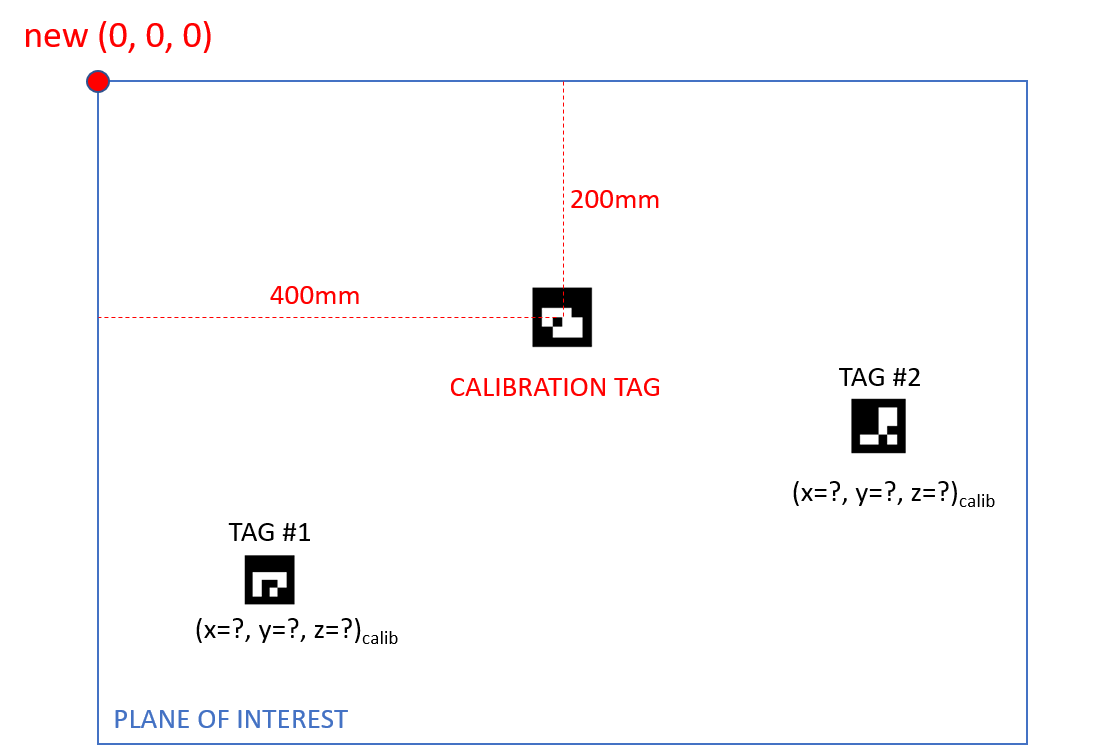
The end goal is to get the x and y coordinates of the markers in mm on the plane of interest. I could then move the origin point, to suite my application, with some simple addition/subtraction as the absolute position of my calibration marker is known.
I’ve already figured out how to get the coordinates of markers in the camera’s coordinate system and how to get the camera’s coordinates in the coordinate system of a marker, but I haven’t been able to understand how can I get the coordinates of a marker, in the coordinate system of another marker.
I’m not really familiar with all of these computer vision concepts, so I have been reading things that have been previously suggested (like this, and this), but I haven’t been able to find a solution yet.
I would really appreciate if you could verify that what I’m trying to do is possible and to point me in the right direction.
Thanks