Hello, I would like to ask for some advise on the project that we're currently working on. The project is a robotic arm but we will use a webcam to capture image of the workspace (from above) as an input. The robot arm will go to the objects and pick them up.
The objectives for the image processing are:
Identify the objects present on the workspace.
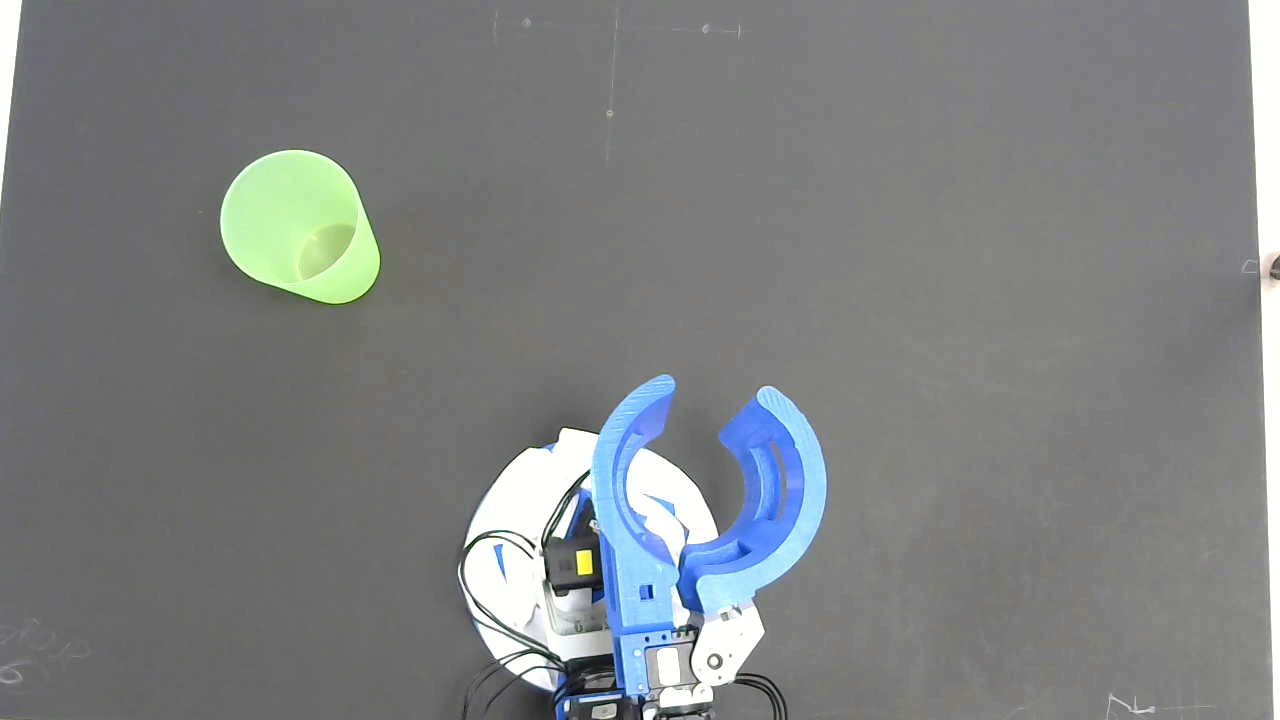
Set the centroid of the base as the origin (see attached photo)
Get the radial distance/ or better yet, coordinate of the (centroid of the)objects.
The height of the webcam is known and is fixed, the base of the robotic arm is fixed, position of the cups(object) is variable. The color of the cups(objects) are the same.
We did some image processing using filters and was able to detect objects and the distance, however we can only do one pair at a time, and not sure how to calibrate the result into real world distance.
I would like to ask if
It will be easier to do tracking (live feed of the workspace) instead of using image.
How can we set the base as origin and get coordinate from there.
What are the proper calibration method for what we are trying to do.
You can see from the photo that the base and the gripper has the same color, therefore we 'covered' it up with something else, is this necessary?
How can we assign an id to the objects detected?
Sorry, some of the questions probably sound stupid. We don't have prior experience in OpenCV and was only following tutorials online; but would like to do a more customized code for our purpose. We are doing OpenCV in python. Thank you for you time.