Hi, I'm fairly new to using OpenCV with C++ and I've been toying around with the blob detection algorithm.
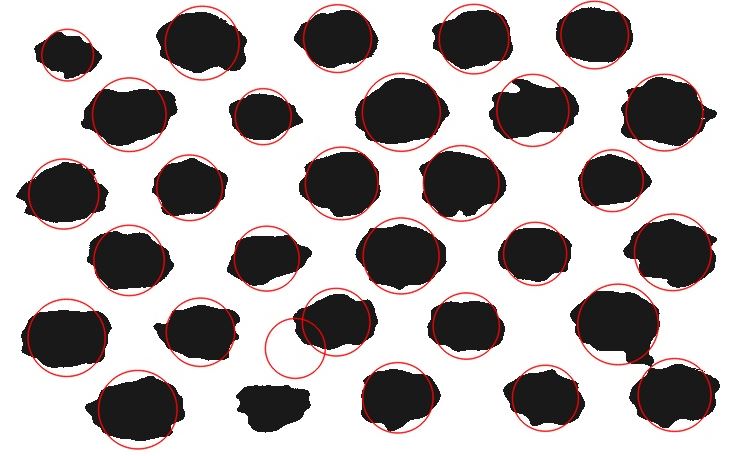
I noticed that there is one particular key point that basically is overlapping with another one really closely.
Is there any explanation as to why this occurs?