Hi, I'm able to get pose of all the detected markers but i'm not able to display the pose of each marker respectively on the image.
for i in range(0, self.ids.size):
#print(self.tvecs[i][0][2])
cv_image=aruco.drawAxis(cv_image, camera_matrix, camera_distortion, self.rvecs[i], self.tvecs[i], 10)
#str_position = "trans"%((self.tvecs[i][0]))
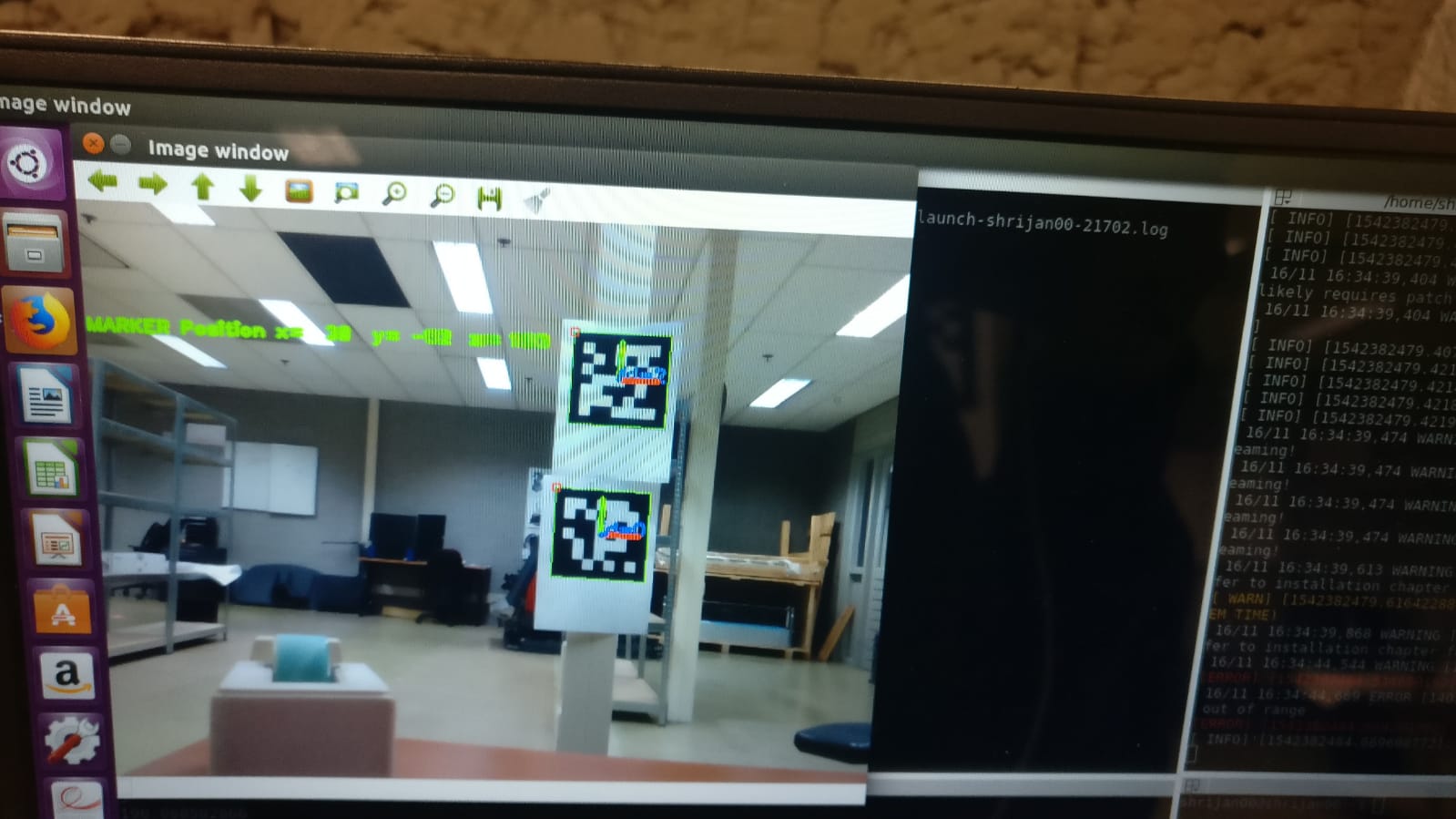
str_position = "MARKER Position x=%4.0f y=%4.0f z=%4.0f"%(self.tvecs[i][0][0], self.tvecs[i][0][1], self.tvecs[i][0][2])
#cv2.putText(cv_image, str_position, (0, 100), font, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(cv_image, "{:.2f}".format(str_position), (0,100), font, 4,(255,255,255), 2, cv2.LINE_AA)
#print(i)
cv2.imshow("Image window", cv_image)
cv2.waitKey(1)
So, anybody knows how to get the respective (x,y) position of the detected markers and then use cv2.putText?