Hello,
i need to triangluate points from two stereo cameras. I have a setup with two cameras that are tilted with an angle of 40° between the image planes. As far as I understand the process, I do the following steps to get the triangulated points:
- Rectify input images using stereoRectify and the camera matrix and distortion vector I get from stereo calibration.
- Using initUndistortRectifyMap to calculate the maps for remapping, here the camera matrix and distrotion coefficients from stereo calibration and the projection matrix and rotation matrix from stereoRectify is used.
- Remap the input image using rempa function and the calculated maps from step 2.
- Finally caluclate the triangulation of matching points from both images using the triangulate function and the projection matrix from stereoRectify.
Did I missed something? I get a result doing these steps. But I suppose that something goes wrong. As i get an inconsistent output from the calculated result in my further processing.
I am suspious if the rectification works correctly. What i get after rectification is the following set for the two cameras.
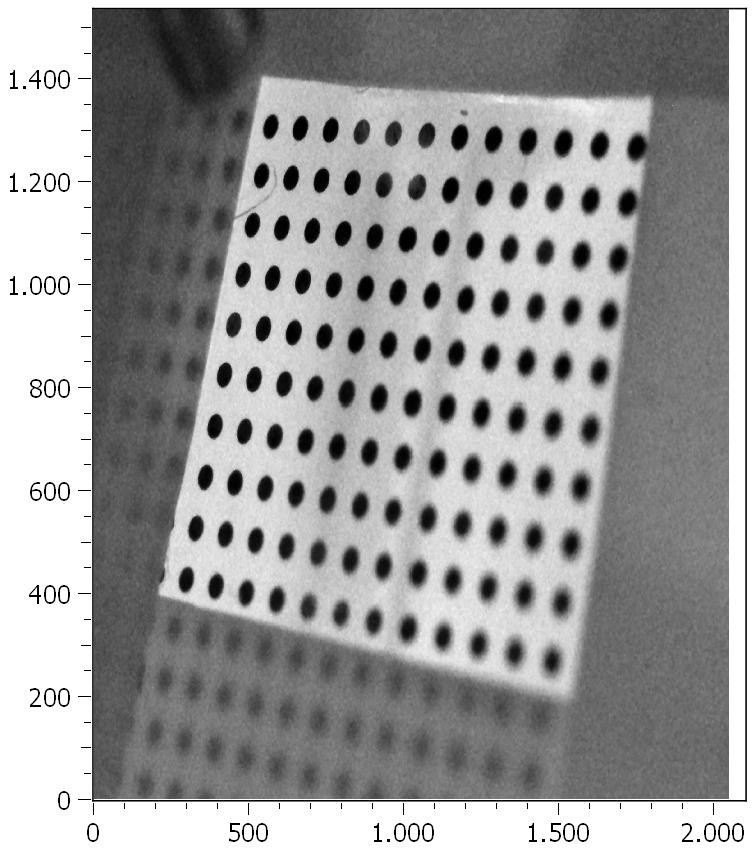
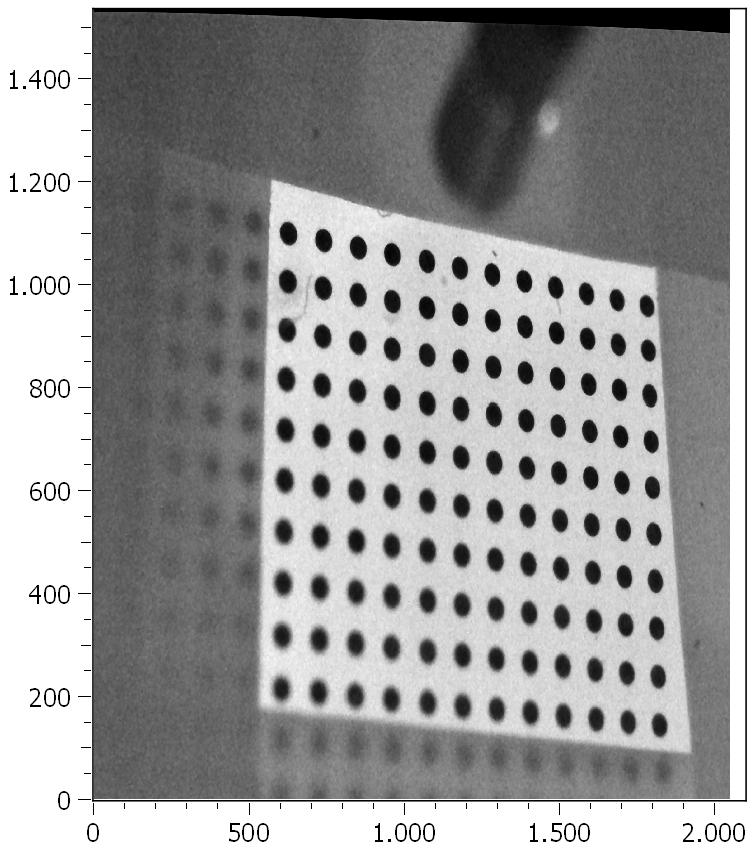
I would appreciate any advice. And i hope i didn´t missed to mention a crucial point.
Kind regards, David