Hey there,
I am adjusting the parameters of my stereo vision pipeline including the stereo matching in form of StereoSGBM. When it comes to setting the parameter blockSize I experience unexpected results. First of all, my interpretation of the parameter:
In my understanding the SGBM algorithm does optimization along multiple scan lines (that's where the G for global originates from?), i.e. we solve the problem of finding the best disparity value for a pixel and the cost function is constructed along the scan lines.
MOST IMPORTANT QUESTION:
Increasing the blockSize mitigates the effect of noise BUT if I find a solution for a small blockSize this should always be a solution for the problem with a larger value for blockSize. However, in my trials it showed that increasing the blockSize does result in less matched pixels, see images (from the top to bottom blockSize are 15, 21 and 27. HOW COMES?
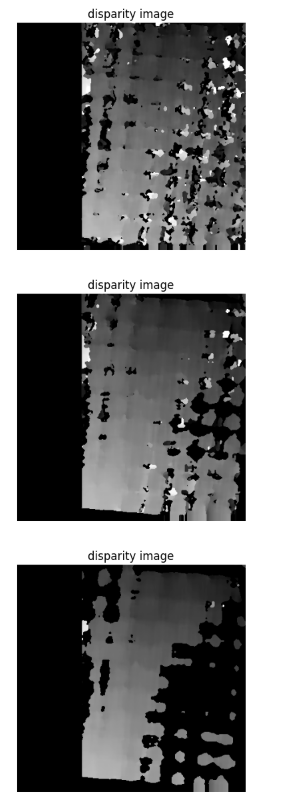 (The disparity maps are obtained from images of a calibration board.)
(The disparity maps are obtained from images of a calibration board.)
Bonus questions:
Question 1: We use a window(block) to calculate the cost, but we do this for every individual pixel -yes or no?
Question 2: Whats the blocks form, is it blockSize-by-blockSize?
Thank you for your help.