I am using cv::stereoRectifyUncalibrated() to rectify two images but I am getting pretty bad results including lots of shearing effects. The steps I am following:
- SURF to detect and match keypoints
- cv::findFundamentalMat() to compute fundamental matrix
- cv::stereoRectifyUncalibrated() to get homography matrix H1 and H2
- cv::warpPerspective() to get the rectified images
I want to use the rectified images for disparity. But can't use due to the bad results of rectification. My questions:
- Is it the fundamental matrix causing the problem?
- or the warpPerspective() transform responsible for this?
- or something else I need take care of?
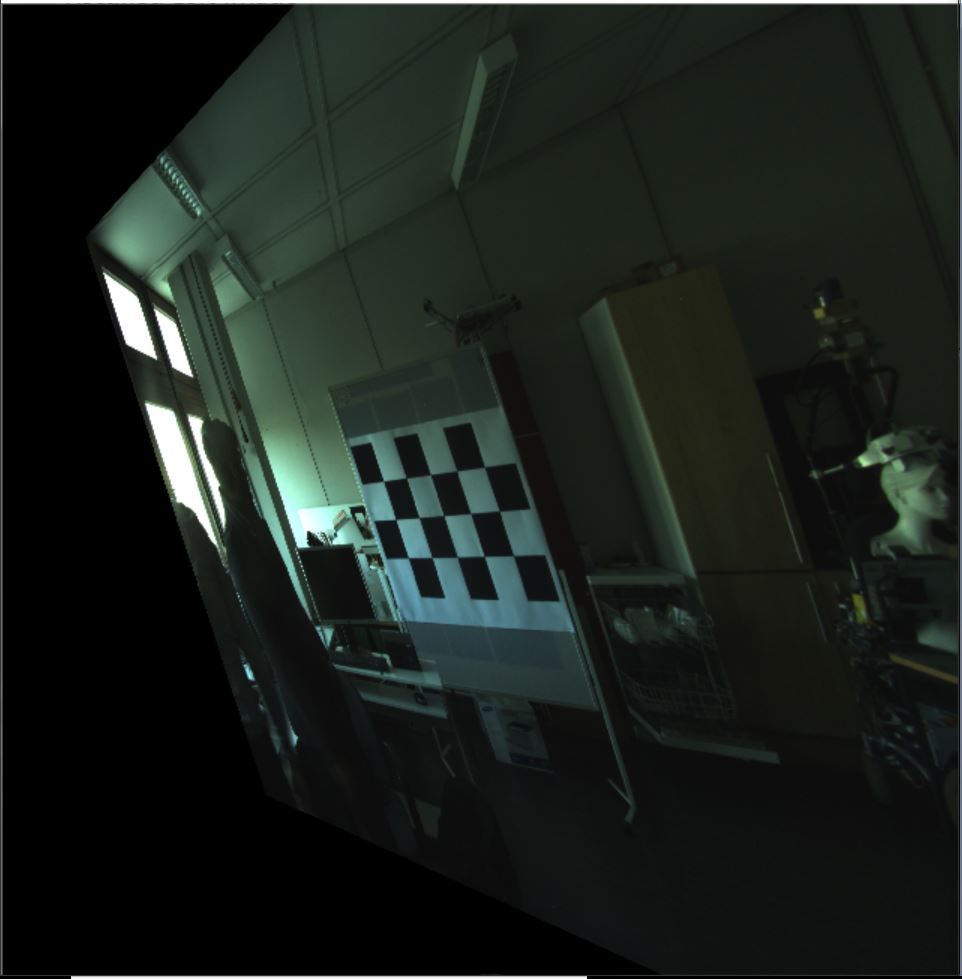
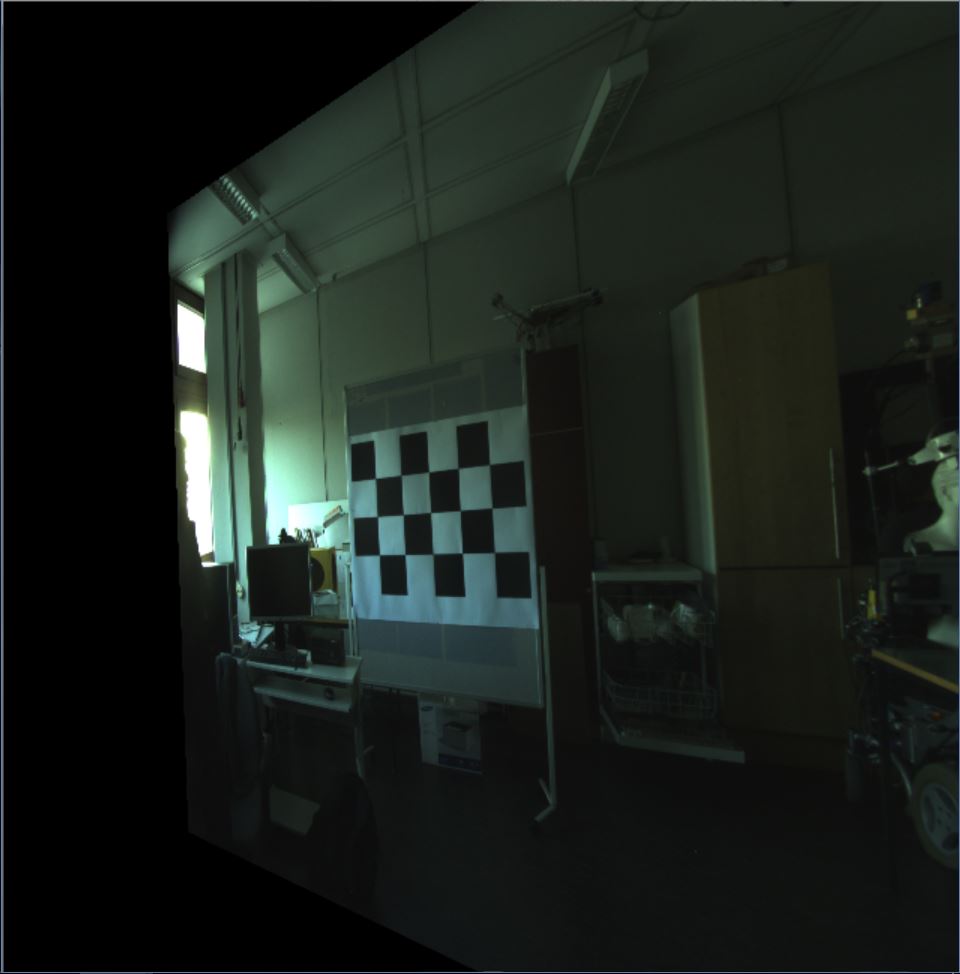
Following is my code and sample images of results. I am new to opencv and appreciate any help.
#include <iostream>
#include <stdio.h>
#include "opencv2/core.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/xfeatures2d.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/core/affine.hpp"
using namespace cv;
using namespace cv::xfeatures2d;
int main()
{
//Loading the stereo images
Mat leftImage = imread("left.jpg", CV_LOAD_IMAGE_COLOR);
Mat rightImage = imread("right.jpg", CV_LOAD_IMAGE_COLOR);
//checking if image file succesfully opened
if (!leftImage.data || !rightImage.data)
{
std::cout << " --(!) Error reading images " << std::endl; return -1;
}
/*showing the input stereo images
namedWindow("Left image original", WINDOW_FREERATIO);
namedWindow("Right image original", WINDOW_FREERATIO);
imshow("Left image original", leftImage);
imshow("Right image original", rightImage);
*/
//::::::::::::::::::::::::::::::::::::::::::::::::
//Step 1: Detect the keypoints using SURF Detector
int minHessian = 420;
Ptr<SURF> detector = SURF::create(minHessian); //here detector is a pointer which points to SURF type object
//create is also a pointer which points to SURF type object
std::vector<KeyPoint> keypointsLeft, keypointsRight; //vectors storing keypoints of two images
detector->detect(leftImage, keypointsLeft);
detector->detect(rightImage, keypointsRight);
//::::::::::::::::::::::::::::::::
//Step 2: Descriptors of keypoints
Mat descriptorsLeft;
Mat descriptorsRight;
detector->compute(leftImage, keypointsLeft, descriptorsLeft);
detector->compute(rightImage, keypointsRight, descriptorsRight);
//std::cout << "descriptor matrix size: " << keypointsDescriptorsLeft.rows << " by " << keypointsDescriptorsLeft.cols << std::endl;
//::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
//Step 3: matching keypoints from image right and image left
//according to their descriptors (BruteForce, Flann based approaches)
// Construction of the matcher
std::vector<cv::DMatch> matches;
static Ptr<BFMatcher> matcher = cv::BFMatcher::create();
// Match the two image descriptors
matcher->match(descriptorsLeft, descriptorsRight, matches);
//std::cout << "Number of matched points: " << matches.size() << std::endl;
//::::::::::::::::::::::::::::::::
//Step 4: find the fundamental mat
// Convert 1 vector of keypoints into
// 2 vectors of Point2f for computing F matrix
// with cv::findFundamentalMat() function
std::vector<int> pointIndexesLeft; //getting index for point2f conversion
std::vector<int> pointIndexesRight; //getting index for point2f conversion
for (std::vector<cv::DMatch>::const_iterator it = matches.begin(); it != matches.end(); ++it) {
// Get the indexes of the selected matched keypoints
pointIndexesLeft.push_back(it->queryIdx);
pointIndexesRight.push_back(it->trainIdx);
}
// Convert keypoints vector into Point2f type vector
//as needed for fundamentalMat() function
std::vector<cv::Point2f> matchingPointsLeft, matchingPointsRight;
cv::KeyPoint::convert(keypointsLeft, matchingPointsLeft, pointIndexesLeft);
cv::KeyPoint::convert(keypointsRight, matchingPointsRight, pointIndexesRight);
//creating clone Mat to draw the keypoints on
Mat drawKeyLeft = leftImage.clone(), drawKeyRight = rightImage.clone();
//check by drawing the points
std::vector<cv::Point2f>::const_iterator it = matchingPointsLeft.begin();
while (it != matchingPointsLeft.end()) {
// draw a circle at each corner location
cv::circle(drawKeyLeft, *it, 3, cv::Scalar(0, 0, 0), 1);
++it;
}
it = matchingPointsRight.begin();
while (it != matchingPointsRight.end()) {
// draw a circle at each corner location
cv::circle(drawKeyRight, *it, 3, cv::Scalar(0, 0, 0), 1);
++it;
}
namedWindow("Left Image Keypoints", WINDOW_FREERATIO);
namedWindow("Right Image Keypoints", WINDOW_FREERATIO);
imshow("Left Image Keypoints", drawKeyLeft);
imshow("Right Image Keypoints", drawKeyRight);
// Compute F matrix from n>=8 matches
cv::Mat fundamental = cv::findFundamentalMat(matchingPointsLeft, // selected point2f points in first image
matchingPointsRight, // selected point2f points in second image
CV_FM_RANSAC); // 8-point method
std::cout << std::endl << "F-Matrix " << fundamental << std::endl << std::endl;
//drawing epipolar lines
//drawEpipolarLines(matchingPointsLeft, matchingPointsRight, fundamental, leftImage, rightImage);
//:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
//Step 5: Getting Homography matrices H1 & H2 using stereoRectifyUncalibrated()
//creating homography mactrices H1, H2
//are used to get rectified images
cv::Mat H1(3, 3, fundamental.type()); //H1 for left image
cv::Mat H2(3, 3, fundamental.type()); //H2 for right image
cv::stereoRectifyUncalibrated(matchingPointsLeft, matchingPointsRight, fundamental, leftImage.size(), H1, H2, 2);
std::cout << "H1 matrix" << H1 << std::endl;
std::cout << std::endl << "H2 matrix" << H2 << std::endl << std::endl;
//creating Mat to hold rectified images
Mat rectifiedLeft, rectifiedRight;
//getting rectified images using final transformation matrix above
warpPerspective(leftImage, rectifiedLeft, H1, leftImage.size(), INTER_LINEAR);
warpPerspective(rightImage, rectifiedRight, H2, leftImage.size(), INTER_LINEAR);
namedWindow("Rectified Left Image", WINDOW_FREERATIO);
namedWindow("Rectified Right Image", WINDOW_FREERATIO);
imshow("Rectified Left Image", rectifiedLeft);
imshow("Rectified Right Image", rectifiedRight);
waitKey(0);
//system("pause");
return 0;
}